ساخت ماشین کنترلی ساده
ماشین های ساده
ماشین ساده گروهی از ماشینها که پایه و اساس ساخت ماشینهای دیگر را تشکیل میدهند، ماشین ساده نامیده میشوند. ماشینهای دیگر حالت تغییر شکل یافته ماشین ساده یا ترکیبی از چند ماشین ساده با یکدیگرهستند. ماشينها وسايلي هستند كه كار ما را آسان مي كننددر تصاوير پائين ماشينهاي ساده را مي بينيد همه اين ماشينهاي ساده نه سوختي مصرف مي كنند و نه ميزان كار را مي كاهندبلكه ميزان نيروي لازم براي انجام كارراكاهش میدهند . ماشينهاي ساده عبارتند از : اهرمها ، چرخ و محور ، قرقره ، سطح شيبدار، گوه و پيچ اهرم نوع اول اهرم میله بلندی است که محلی از آن به جایی تکیه دارد. برای مثال میله الاکلنگ را در نظر بگیرید، میلهای از وسط به محلی تکیه دارد، دو نیرو از دو انتهای میله بر میله اثر میکنند و سبب نوسان میله میشود. به فرض اگر نیروی محرک از سمت راست بر انتهای میله بطور قائم و به سمت پایین وارد شود به علت اثر این نیرو ، نیروی مقاوم بر انتهای دیگر میله و به سمت بالا در راستای قائم وارد می شود، فاصله بین نیروی محرک تا تکیه گاه بازوی محرک و فاصله بین نقطه اثر نیروی مقاوم تا تکیه گاه بازوی مقاوم نامیده میشود. اهرم نوع دوم در این نوع از اهرم تکیه گاه بر یکی از دو انتهای میله منطبق است، اگر نیروی محرک بر انتهای دیگر میله و بطور قائم به سمت بالا وارد شود، نیروی مقاوم بر وسط میله در راستای قائم و به سمت بالا وارد میشود. در این حالت نیروی مقاوم بین تکیه گاه و نیروی محرک قرار دارد. اهرم نوع سوم در این نوع اهرم که عکس نوع دوم است. میله از یکی از دو انتهای خود از بالا به تکیه گاه تکیه کرده است و نیروی محرک بر وسط میله اثر میکند، در راستای قائم و به سمت بالا و نیروی مقاوم بر انتهای دیگر میله و در راستای قائم به سمت بالا وارد میشود. در این نوع اهرم نیروی محرک بین تکیه گاه و نیروی مقاوم قرار دارد. مزیت مکانیکی اهرم همچون هر ماشین از نسبت نیروی محرک و مقاوم بدست میآید. البته اگر از اصطکاک صرفنظر کنیم، مزیت مکانیکی اهرم از نسبت طول بازوی محرک بر طول بازوی مقاوم هم بدست میآید. قرقره قرقره یک ماشین ساده است، هر قرقره محوری دارد که حول آن میتواند آزادانه بچرخد، البته گاهی میتوان دو یا چند قرقره ثابت و متحرک را باهم ترکیب کرد و یک قرقره مرکب بوجود آورد. قرقرهها را میتوان نوعی اهرم به شمار آورد با این تفاوت که دامنه حرکت اهرم محدود است، اما دامنه حرکت قرقره محدود نیست. در یک قرقره که از مرکز به محلی توسط میله متصل است و طنابی از دور آن رد شده و به یکی از دو انتهای آن جسمی آویزان است. اگر انتهای آزاد طناب را بکشیم جسم در سمت دیگر ...
ساخت هواپیمای رادیو کنترل با استفاده از مدار های ماشین اسباب بازی!!!!!!!!!!!!
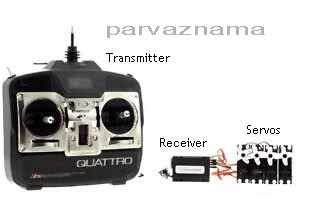
کنترل حرکت در هواپیما های مدل توسط سیستم رادیو کنترل انجام میشود که شامل بخش فرستنده و گیرنده می باشد.امواج ارسال شده از فرستنده توسط مدار گیرنده دریافت و به صورت فرمان الکتریکی به سرووها منتقل و باعث حرکت سطوح کنترلی و در نتیجه تغییر مسیر مدل می گردد. و اما رادیو کنترل برای مدلی که می سازید را یا باید به صورت حاضری از فروشگاههای مخصوص مدلهای پروازی خریداری کنید که قیمت آن بسته یه تعداد کانالها و مدل و مارک کارخانه سازنده متغیر می باشد ولی معمولا یک ست رادیو کنترل ۴ کاناله شامل فرستنده،گیرنده و ۳ یا ۴ عدد سروو حدود ۱۵۰ هزار تومان می شود که البته برای همه از جمله مبتدیان قابل تهیه نیست و هزینه زیادی برایشان می باشد راه دیگر برای تهیه رادیو کنترل استفاده از فرستنده و گیرنده مدلهای حاضری دیگر مثل هواپیماها و ماشین های مدل ارزان قیمت میباشد که البته معمولا ۲ کاناله هستند که در شکلهای زیر نمونه هایی از آنها را مشاهده می کنید. البته تهیه رادیو کنترل ماشین های مدل راحتتر هست و ارزانتر هم تمام می شود و با قیمتی حدود ۷ یا ۸ هزار تومان می توانید یک ماشین رادیو کنترلی نسبتا خوب خریداری کنید که غیر از قسمت رادیو کنترل آن از موتور ها و بقیه قطعات آن هم می توانید استفاده نمایید.ولی در صورت امکان از مدلی که در زیر شکل آن دیده می شود تهیه کنید چون رادیو کنترل آن برد زیادی دارد و نقشه مدارات آن را هم بدست آورده ام و امکان بهبود و تغییرات نیز در آن وجود دارد. در این ماشین ها مدار فرستنده با ولتاژ ۳ ولت (۲ عدد باطری قلمی) و مدار گیرنده با ولتاژ ۹ ولت (۶ عدد باطری قلمی) کار میکند و بردی حدود ۳۰ متر را پوشش می دهد. برای استفاده از این رادیو کنترل جهت هواپیمای مدل اولین و مهمترین چیزی که می بایست تقویت کرد برد فرستنده هست که حداقل نیاز به ۷۰ تا ۱۰۰ متر می باشد. برای افزایش برد در یک فرستنده کنترل از راه دور ۲ راه وجود دارد ۱-افزایش طول آنتن۲- افزایش ولتاژ کار فرستنده رادیو کنترل. معمولا در ماشین های مدل از آنتن های مفتولی و فنری به طول حدود ۳۰ سانتی متر استفاده می شود که البته برای استفاده مورد نظر ما کم می باشد و باید از آنتن های تلسکوپی به طول ۷۰ تا ۱۰۰ سانتی متر استفاده کنید که براحتی و از فروشگاههای فروش لوازم و قطعات الکتریکی و به قیمتی حدود ۱۰۰۰ تومان قابل تهیه می باشد.همچنین به انتهای آن یک روبان قرمز رنگ به طول حدود ۳۰ سانتی متر ببندید که برای مشخص شدن جهت وزش باد در موقع پرواز دادن مدل مفید می باشد. در مورد افزایش ولتاژ تغذیه مدار فرستنده هم باید بگویم که در اصل ولتاژ کار مدار این گونه ماشین ...
آموزش ساخت ماشین 3دی مکس
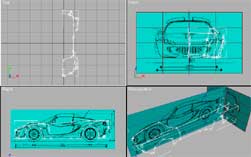
You will see that in this tutorial I used edit mesh for most of the time, but if you have 3dsmax 5 or 3dsmax 4 with mesh tools, I suggest that you use editable poly since it has some features that makes your modeling a lot easier (like selecting entire edge loops). Also insted of using slice modifier you can use quick slice or just "cut" from editable poly. First of all I had to find some Lotus Elise blueprints... but although I search hard all the web I didn't find them. I only found the Lotus Elise mk2 blueprints and I studied them carefully and found they are somehow similar in shape as the lotus Elise 1. So my idea was tot make a primary mesh of the car after this blueprints and them modify the mesh after the images of Lotus Elise 1 ( I downloaded I think 30-40 of images of Elise 1 in all positions) Of course the blueprints were white with black lines. So I had to modify them in photoshop by replacing the white with a light blue ( I didn't want the blueprints to interfere with the object (white when selected). After that I created 2 boxes as the same ratio as the blueprints and placed the bitmap on them. Then I started to create lines in the Right view corresponding to the shape of the car. Then I moved the vertices in the Front view and Perspective corresponding to the blueprints. I didn't try to make the lines bezier or smooth, I only worked with corners (not like in my first car tutorial) because my goal is to create a low poly mesh and then edit it with mesh edit and mesh smooth. Notice what configuration I made for the headlight: I didn't wanted the spline network to be very complicated but only to have the major lines of the car. The rest well done with edit mesh. Make sure you have splines to that are making surfaces of 3 or 4 splines. We do that, because will use the Surface modifier that will create a patch where it finds 3 or 4 splines intersecting each other. So, I applied a surface modifier with 0 steps and then a Edit mesh modifier : Now you can forget about splines and surface, from now on I only used edit mesh. I created some faces like in image (selecting the outer edges and extruding them inside) : I also created 2 additional faces (with 3 sides) after I extruded the edges.(E.g.. in the picture above the last face from the right is created, the left one isn't created yet) The same way I worked with the others outer edges of the car : This is how I made the air wing (hmm sorry I don't know how to call it :) You probably notice that I already started to work with a true picture of the Elise 1 and trying to correct the differences between the mesh I made after the blueprints and the images of the Elise 1. Next I created a mirror reference copy of the object. The headlights: I selected the faces from the headlights and I scaled them: With the four faces selected I extruded them inside (-5) and then outside (+2): Next I selected the edge near the headlights and chamfer them (the faces will result will be the smaller headlight): I extrude the faces inside, twice : Next , I deleted the reference I made earlier (after tweaking the mesh and when I was sure the proportions were correct). Then I created a mirror copy (not reference) and I attached the new object to the older one (in edit mesh). Then I selected the central edges and I welded them: The backlights: Now it was time to work at the back. I didn't created the back lights with the half of the mesh, because I didn't saw correctly the influence of the changes I made to the mesh. Now with all the mesh, I was able to make changes, to apply mesh smooth and see how it looks.Like in front with the smaller headlights, here I chamfer two edges, then extruded the faces: Then It came the second pair of headlights (see in the pictures how I deleted some face then created them again with different diagonal): I sliced the middle faces between the backlights to create some room for the registration number: After that I started to work with ...
اموزش ساخت یه رادیو کنترل ساده و کوچک!!!
اما کم کم طراحی رو شروع کنیم:با مراجعه به دیتاشیت آی سی اول می بینیم که تمام شماتیک مدار مورد نظرمون یعنی همون فرستنده مادون قرمز یا Remote Control اونجا هست و هیچ نیازی به این نیست که تغییراتی رو اعمال کنیم.صرفا مساله طراحی PCB می مونه که از این بحث خارجه.و اما شماتیک:همونطور که توی این شماتیک می بینید ما می تونیم یه ریموت کنترل 18 کلیده داشته یاشیم که کلید ها بصورت ماتریسی روی آی سی قرار می گیرند.و بصورت سه سطر در شش ستون چیده می شند.در مورد R توی شماتیک (روی بیس ترانزیستور) مقاومت 680 یا 820 اهم رو انتخاب می کنیم.و همچنین در مورد ترانزیستور 2SA1015 انتخاب میشه.IR LED رو هم که میدونید یه LED مادون قرمز معمولی فرستنده (شفاف) میندازیم.فکر نمی کنم در مورد مدار فرستنده دیگه مشکلی وجود داشته باشه بجز اینکه رنج تغذیه مدار بسیار جالب هستش... 2.2 ولت تا 5 ولت.پس به راحتی می تونید از باتریهای معمولی که توی این رنج ولتاژ هستند استفاده کنید.و اما مدار گیرنده.با مراجعه به دیتا شیت این آی سی چیز زیادی جز نحوه بستن تغذیه آی سی و پین های کنترلی دستگیرمون نمیشه.اینجا یه نکته پیش میاد و اون اینکه از حالا باید نیاز خودتون رو تعیین کنید.به این معنی که باید بدونید به 10 کانال نیاز دارید یا 18 تا.چون برای داشتن 10 کانال باید از آی سی PT2249 و برای داشتن 18 کانال از آی سی PT2250 استفاده کنید.فعلا شماتیک های مربوط به هرکدوم رو که از دیتاشیت بیرون کشیدم رو ببینین:همونطوری که توی شکل ها می بینید پین هایی از آی سی ها که توی قسمت Control Signal Output قرار گرفتن پین های مربوط به خروجی های مدار ما هستند که توی اولی دو تا و در دومی 18 تا هستن.سلام مجدد.خوب میرسیم به قسمت طراحی:این آی سی و به عبارتی مدار گیرنده ما سه قسمت عمده داره:1-قسمت تغذیه آی سی2-قسمت گیرنده یا همون سنسور مادون قرمز3-خروجی مداربرای هرکدوم جدا گانه طراحی رو انجام میدیم.بیاید اول از قسمت خروجی شروع کنیم.چون هم از اون دوتای دیگه کار بیشتری میبره و هم سخت تره.(حالا میگم چرا)برای این کار قبل از هرچیز باید بدونیم که خروجی ما هر به هرالمان الکتریکی و الکترونیکی که قدرت سوئیچ کردن یا فرمان دادن رو داشته باشه میتونه وصل شه.از جمله رله ، ترانزیستور ، تریاک ، میکرو و...اما بیاید فرض کنیم که میخوایم این خروجی ها رو به رله بدیم.یا یکم عامیانه ترش اینکه فرضا می خوایم وسایلی مث لامپ های خونه یا تلوزیون و ... رو خاموش و روشن کنیم.بقیه المانهای مورد اشاره هم برای وصل شدن به آی سی مشکلی ندارن.ولی حالا بریم روی مدار:همونطور که می بینید یک دونه از مدار مربوطه رو روی پین 13 کشیدم و بقیه پین ها رو بعهده خودتون گذاشتم.درواقع همه پینها ...
آموزش ساده و روان avr
یک کتاب بسیار عالی از انتشارات جهاد دانشگاهی برای آموزش کاربردی و ساده ی avr (آسان و روان = avr) این کتاب با زبانی بسیار ساده مطالب رو توضیح داده و مثل بقیه ی کتاب ها شروع نکرده از رجیستر ها و چیزهای سخت شروع کنه . . . به صورت تصویری و گام به گام و عالی توضیح داده و برای کسی که بخواد کار با این میکروکنترلر ها رو شروع کنه عالیه کلا مهندس های برق باید با میکروکنترلر و آی سی های مختلف آشنا باشن و فقط قصد پاس کردن ترم های متوالی رو نداشته باشن. . . با این میکروکنترلر ها هم میشه ربات های مختلف ساخت هم میشه پروژه های جالب مثل ضربان نبض سنج ، دما سنج ، ماشین حساب ، ماشین کنترلی ، نمایشگر های مختلف ، تابلو های روان و ثابت و . . . ساخت. کلا میکروکنترلر یه چیز جالب و بسیار کاربردیه!!!! این کتاب رو میتونید از انقلاب تهیه کنید . . . یا از طریق لینک زیر سفارش اینترنتی بدید http://jdbook.ir/Pages/BookDetail.aspx?itemid=67271&editionid=76586 سعی کردیم کتاب بسیار ساده و عملی نوشته بشه ولی اگر هر جای آن را متوجه نشدید به ما ایمیل بزنید تا بهتون کامل توضیح بدیم
قابلیت های ویژه نرم افزار EMC2 ( قسمت اول)
این نرم افزار از یک نرم افزار ساده کنترلی است و شامل قابلیت های منحصر به فردی است . از توانایی های کم نظیر این نرم افزار تبدیلفایل های فرمت عکس (png , jpeg ,...) به Gکد است. از این قابلیت می توان برای حکاکی آرم های مختلف بدون نیاز به طراحی و Gکد گیری و بدون استفاده از نرم افزار های CAD ،CAM استفاده کرد . از قابلیت های دیگر این نرم افزار HALLSCOP است که به کار بر توانایی نمایش و ذخیره ی تمامی ورودی و خروجی ها در پین ها را می دهد . از آن میتوان مانند یک اسیلوسکوپ با قابلیت ذخیرهسازی اطلاعات استفاده کرد . از قابلیتهای مهم و پرکاربرد این نرم افزار کنترل سروموتور می باشد که با نصب کارت هایی مانند AX5214H یا m5i20 یا SERVO-TO-GO می توان در یک لوپ بسته و استفاده از خطکش یا انکودر سروموتور را کنترل کرد .
موتور های سوختی هواپیما
شیر سوزنی کنار موتور را که مقدار سوخت را تنظیم میکند کاملا ببندید و سپس به اندازه سه دور کامل آن را باز کنید (جهت عقربه ساعت بسته میشود و خلاف جهت عقربه ساعت بازمیشود).انگشت شست خود را بر روی Carb قرار دهید (Carb در حقیقت همون کاربراتور هست که در اینجا قسمت عبود هوا از خارج به داخل مورد نظر است و شما باید با انگشت شست این قسمت را به صورت دستی موقتا مسدود کنید) سپس در همین حال چند بار با دست دیگرتان ملخ را بچرخانید تا اینکه سوخت در مسیر بین مخزن تا کاربراتور قرار بگیرد. (به این قسمت بیشتر دقت کنید: برای انتقال سوخت به کاربراتور توجه داشید که به هیچ عنوان باتری سر شمع را هنوز وصل نکرده باشید به شمع موتور چون در صورت روشن شدن موتور، به انگشتانتان صدمه وارد میشود. ضمنا برای انتقال سوخت به کاربراتور وقتی ملخ را تا حدی میچرخانید در مرحله ای از چرخش ملخ گیر میکند که این همان زمانی است که مکش سوخت از مخزن انجام میشود و در این لحظه اگر انگشتتان را از روی کاربرات بردارید سوخت بهتر هدایت میشود، همینکار را باید آنقدر انجام دهید تا سوخت را در داخل شیلنگ ارتباطی بین مخزن تا کاربراتور مشاهده کنید.)در صورتی که هر کدام از سه عمصر بالا وجود نداشته باشد و موتور شما روشن نخواهد شد. کارکرد موتورهای دو زمانه: کاکرد یک موتور دو زمانه نسبتا ساده است. میل لنگ موتور یک چرخش کامل را در هر سیکل نیرو میسازد، در طی حرکت پیستون به سمت بالا، مخلوط هوا و سوخت در بالای آن جهت اشتعال فشرده میشود، در همان زمان یک مخلوط تازه به سوی Crankcase (پائین پیستون) انتقال پیدا میکند. پس از اشتعال پستون اجبارا با سرخت به صرف پائین حرکت میکند و دود به وجود آمده از بندر اگزوز خارج میشود، در همان زمان یک مخلوط سوخت و هوای دیگرتوسط Carb به سوی Crankcase انتقال پیدا کرده است. دریچه ورودی بسته شده است و مخلوط اجبارا توسط بندرهای انتقال، به قسمت بالای استوانه پیستون انتقال پیدا میکند تا یک چرخه نیروی جدید شروع شود. رابط های انتقال سوخت (شلنگ ها) نصب مناسب راه های ارتباطی سوخت بسیار مهم است. شلنگ ها برای قطعات بزرگ باشند ممکن است باعث خاموش شدن موتور در هنگام پرواز بشوند، وقتی شیلنگ نسبت به محل اتصالش بزرگتر باشد و به محل اتصال شل وصل باشد، باعث نشت هوا به داخل سوخت میشود و حباب های هوا که جای سوخت را میگیرند باعث بد کار کردن موتور و حتی خاموش شدن آن خواهند شد (حباب های هوا در داخل شلنگ در حالی که موتور روشن است به چسم دیده میشوند و تشخیص آنها جهت رفع عیب ساده است).همچنین طول شیلنگ ها باید به قدری بلند باشد تا به حالت کششی قرار نگیرد چون در این حالت احتمال مسدود شدن شلنگ و ...
نقش PLC در اتوماسیون صنعتی
اتوماسیون صنعتی نقش PLC در اتوماسیون صنعتی با توجه به پیشرفت بسیار سریع تکنولوژی و وجود رقابتهای شدید در بین صنعتگران دو مقولة دقت و زمان در انجام کارهای تولیدی و خدماتی بسیار مهم و سرنوشت ساز شده است. دیگر سیستمهای قدیمی جوابگوی نیازهای صنعت توسعه یافتة امروز نبوده و بکار بردن سیستمهایی که با دخالت مستقیم نیروی انسانی عمل می کنند، امری نامعقول مینمود. چرا که در این موارد دقت و سرعت عمل سیستم بسیار پایین و وابسته به نیروی کاربر است. بنابراین ماشینهای هوشمند و نیمههوشمند وارد بازار صنعت شدند. و بعد از مدتی آنچنان جای خود را پیدا کردند که علاوه بر زمینههای صنعتی در کارهای خدماتی نیز جایگاه ویژهای یافتند. کنترل سیستمهای بسیار پیچیدهای که قبلاً غیرممکن بود براحتی انجام میگرفت . مکانیزه کردن سیستمها و ماشین آلات (اتوماسیون صنعتی ) مقوله بسیار مهم و پرطرفداری شده و نیاز به آن هر روز بیشتر و بیشتر مشهود میشود . اتوماسیون صنعتی در زمینههای بسیار گستردهای کاربرد دارد از مکانیزه کردن یک ماشین بسیار سادة کنترل سطح گرفته تا مکانیزه نمودن چندین خط تولید و شبکه کردن آنها با هم . با نگاهی به محیط اطرافمان میتوانیم نمونههای بسیار زیادی از کاربرد اتوماسیون ا را در اغلب زمینهها پیدا کنیم.. در اتوماسیون واحدهای مسکونی جدید ، در شبکههای مخابراتی ، در سیستمهای دفع فاضلاب ، سیستم توزیع برق ، کارخانجات مختلف و ... در یک سیستم اتوماسیون شده کنترل پروسه توسط ماشین انجام میشود و در این سیستمها دخالت انسان به حداقل و در برخی موارد به صفر رسیده است. سیستم با گرفتن سیگنالهای ورودی از قطعاتی نظیر سنسورهای تشخیص فشار ، رنگ ، سطح مایعات ، قطعات فلزی ، سنسورهای دما ، میکرو سوییچها ، کلیدها و شستیها ، واسط های کاربر با ماشین و... وضعیت موجود را حس کرده و بررسی میکند و سپس در مورد عکسالعمل ماشین تصمیمگیری کرده و فرمانهای لازمه را به قطعات خروجی که تحت کنترل ماشین هستند اعمال میکند. با توجه به مواردی که ذکر شد میتوان ساختار یک سیستم اتوماسیون را بدین صورت لیست نمود: قطعات ورودی شامل سنسورها ، سوییچها ، ... قطعات خروجی مثل موتور ، پمپ ، شیربرقی ، نشانگرها ... یک کنترلر داخلی با CPU برای پردازش دادهها و اجرای برنامة کنترلی سیستم و حافظه برای ذخیره نمودن برنامة کنترلی و اطلاعات دریافتی از قطعات ورودی یک واسط بین کاربر و ماشین Human Machine Interface ( در مواردی که نیاز به انجام تنظیمات توسط کاربر داریم و یا میخواهیم یکسری اطلاعات و آلارمها را به اطلاع کاربر برسانیم .) توجه داشته ...
ماشین های ساده
ماشین ساده گروهی از ماشینها که پایه و اساس ساخت ماشینهای دیگر را تشکیل میدهند، ماشین ساده نامیده میشوند. ماشینهای دیگر حالت تغییر شکل یافته ماشین ساده یا ترکیبی از چند ماشین ساده با یکدیگرهستند. ماشينها وسايلي هستند كه كار ما را آسان مي كننددر تصاوير پائين ماشينهاي ساده را مي بينيد همه اين ماشينهاي ساده نه سوختي مصرف مي كنند و نه ميزان كار را مي كاهندبلكه ميزان نيروي لازم براي انجام كارراكاهش میدهند . ماشينهاي ساده عبارتند از : اهرمها ، چرخ و محور ، قرقره ، سطح شيبدار، گوه و پيچ اهرم نوع اول اهرم میله بلندی است که محلی از آن به جایی تکیه دارد. برای مثال میله الاکلنگ را در نظر بگیرید، میلهای از وسط به محلی تکیه دارد، دو نیرو از دو انتهای میله بر میله اثر میکنند و سبب نوسان میله میشود. به فرض اگر نیروی محرک از سمت راست بر انتهای میله بطور قائم و به سمت پایین وارد شود به علت اثر این نیرو ، نیروی مقاوم بر انتهای دیگر میله و به سمت بالا در راستای قائم وارد می شود، فاصله بین نیروی محرک تا تکیه گاه بازوی محرک و فاصله بین نقطه اثر نیروی مقاوم تا تکیه گاه بازوی مقاوم نامیده میشود. اهرم نوع دوم در این نوع از اهرم تکیه گاه بر یکی از دو انتهای میله منطبق است، اگر نیروی محرک بر انتهای دیگر میله و بطور قائم به سمت بالا وارد شود، نیروی مقاوم بر وسط میله در راستای قائم و به سمت بالا وارد میشود. در این حالت نیروی مقاوم بین تکیه گاه و نیروی محرک قرار دارد. اهرم نوع سوم در این نوع اهرم که عکس نوع دوم است. میله از یکی از دو انتهای خود از بالا به تکیه گاه تکیه کرده است و نیروی محرک بر وسط میله اثر میکند، در راستای قائم و به سمت بالا و نیروی مقاوم بر انتهای دیگر میله و در راستای قائم به سمت بالا وارد میشود. در این نوع اهرم نیروی محرک بین تکیه گاه و نیروی مقاوم قرار دارد. مزیت مکانیکی اهرم همچون هر ماشین از نسبت نیروی محرک و مقاوم بدست میآید. البته اگر از اصطکاک صرفنظر کنیم، مزیت مکانیکی اهرم از نسبت طول بازوی محرک بر طول بازوی مقاوم هم بدست میآید. قرقره قرقره یک ماشین ساده است، هر قرقره محوری دارد که حول آن میتواند آزادانه بچرخد، البته گاهی میتوان دو یا چند قرقره ثابت و متحرک را باهم ترکیب کرد و یک قرقره مرکب بوجود آورد. قرقرهها را میتوان نوعی اهرم به شمار آورد با این تفاوت که دامنه حرکت اهرم محدود است، اما دامنه حرکت قرقره محدود نیست. در یک قرقره که از مرکز به محلی توسط میله متصل است و طنابی از دور آن رد شده و به یکی از دو انتهای آن جسمی آویزان است. اگر انتهای آزاد طناب را بکشیم جسم در سمت دیگر ...
ساخت هواپیمای رادیو کنترل با استفاده از مدار های ماشین اسباب بازی!!!!!!!!!!!!
کنترل حرکت در هواپیما های مدل توسط سیستم رادیو کنترل انجام میشود که شامل بخش فرستنده و گیرنده می باشد.امواج ارسال شده از فرستنده توسط مدار گیرنده دریافت و به صورت فرمان الکتریکی به سرووها منتقل و باعث حرکت سطوح کنترلی و در نتیجه تغییر مسیر مدل می گردد. و اما رادیو کنترل برای مدلی که می سازید را یا باید به صورت حاضری از فروشگاههای مخصوص مدلهای پروازی خریداری کنید که قیمت آن بسته یه تعداد کانالها و مدل و مارک کارخانه سازنده متغیر می باشد ولی معمولا یک ست رادیو کنترل ۴ کاناله شامل فرستنده،گیرنده و ۳ یا ۴ عدد سروو حدود ۱۵۰ هزار تومان می شود که البته برای همه از جمله مبتدیان قابل تهیه نیست و هزینه زیادی برایشان می باشد راه دیگر برای تهیه رادیو کنترل استفاده از فرستنده و گیرنده مدلهای حاضری دیگر مثل هواپیماها و ماشین های مدل ارزان قیمت میباشد که البته معمولا ۲ کاناله هستند که در شکلهای زیر نمونه هایی از آنها را مشاهده می کنید. البته تهیه رادیو کنترل ماشین های مدل راحتتر هست و ارزانتر هم تمام می شود و با قیمتی حدود ۷ یا ۸ هزار تومان می توانید یک ماشین رادیو کنترلی نسبتا خوب خریداری کنید که غیر از قسمت رادیو کنترل آن از موتور ها و بقیه قطعات آن هم می توانید استفاده نمایید.ولی در صورت امکان از مدلی که در زیر شکل آن دیده می شود تهیه کنید چون رادیو کنترل آن برد زیادی دارد و نقشه مدارات آن را هم بدست آورده ام و امکان بهبود و تغییرات نیز در آن وجود دارد. در این ماشین ها مدار فرستنده با ولتاژ ۳ ولت (۲ عدد باطری قلمی) و مدار گیرنده با ولتاژ ۹ ولت (۶ عدد باطری قلمی) کار میکند و بردی حدود ۳۰ متر را پوشش می دهد. برای استفاده از این رادیو کنترل جهت هواپیمای مدل اولین و مهمترین چیزی که می بایست تقویت کرد برد فرستنده هست که حداقل نیاز به ۷۰ تا ۱۰۰ متر می باشد. برای افزایش برد در یک فرستنده کنترل از راه دور ۲ راه وجود دارد ۱-افزایش طول آنتن۲- افزایش ولتاژ کار فرستنده رادیو کنترل. معمولا در ماشین های مدل از آنتن های مفتولی و فنری به طول حدود ۳۰ سانتی متر استفاده می شود که البته برای استفاده مورد نظر ما کم می باشد و باید از آنتن های تلسکوپی به طول ۷۰ تا ۱۰۰ سانتی متر استفاده کنید که براحتی و از فروشگاههای فروش لوازم و قطعات الکتریکی و به قیمتی حدود ۱۰۰۰ تومان قابل تهیه می باشد.همچنین به انتهای آن یک روبان قرمز رنگ به طول حدود ۳۰ سانتی متر ببندید که برای مشخص شدن جهت وزش باد در موقع پرواز دادن مدل مفید می باشد. در مورد افزایش ولتاژ تغذیه مدار فرستنده هم باید بگویم که در اصل ولتاژ کار مدار این گونه ماشین ...
آموزش ساخت ماشین 3دی مکس
You will see that in this tutorial I used edit mesh for most of the time, but if you have 3dsmax 5 or 3dsmax 4 with mesh tools, I suggest that you use editable poly since it has some features that makes your modeling a lot easier (like selecting entire edge loops). Also insted of using slice modifier you can use quick slice or just "cut" from editable poly. First of all I had to find some Lotus Elise blueprints... but although I search hard all the web I didn't find them. I only found the Lotus Elise mk2 blueprints and I studied them carefully and found they are somehow similar in shape as the lotus Elise 1. So my idea was tot make a primary mesh of the car after this blueprints and them modify the mesh after the images of Lotus Elise 1 ( I downloaded I think 30-40 of images of Elise 1 in all positions) Of course the blueprints were white with black lines. So I had to modify them in photoshop by replacing the white with a light blue ( I didn't want the blueprints to interfere with the object (white when selected). After that I created 2 boxes as the same ratio as the blueprints and placed the bitmap on them. Then I started to create lines in the Right view corresponding to the shape of the car. Then I moved the vertices in the Front view and Perspective corresponding to the blueprints. I didn't try to make the lines bezier or smooth, I only worked with corners (not like in my first car tutorial) because my goal is to create a low poly mesh and then edit it with mesh edit and mesh smooth. Notice what configuration I made for the headlight: I didn't wanted the spline network to be very complicated but only to have the major lines of the car. The rest well done with edit mesh. Make sure you have splines to that are making surfaces of 3 or 4 splines. We do that, because will use the Surface modifier that will create a patch where it finds 3 or 4 splines intersecting each other. So, I applied a surface modifier with 0 steps and then a Edit mesh modifier : Now you can forget about splines and surface, from now on I only used edit mesh. I created some faces like in image (selecting the outer edges and extruding them inside) : I also created 2 additional faces (with 3 sides) after I extruded the edges.(E.g.. in the picture above the last face from the right is created, the left one isn't created yet) The same way I worked with the others outer edges of the car : This is how I made the air wing (hmm sorry I don't know how to call it :) You probably notice that I already started to work with a true picture of the Elise 1 and trying to correct the differences between the mesh I made after the blueprints and the images of the Elise 1. Next I created a mirror reference copy of the object. The headlights: I selected the faces from the headlights and I scaled them: With the four faces selected I extruded them inside (-5) and then outside (+2): Next I selected the edge near the headlights and chamfer them (the faces will result will be the smaller headlight): I extrude the faces inside, twice : Next , I deleted the reference I made earlier (after tweaking the mesh and when I was sure the proportions were correct). Then I created a mirror copy (not reference) and I attached the new object to the older one (in edit mesh). Then I selected the central edges and I welded them: The backlights: Now it was time to work at the back. I didn't created the back lights with the half of the mesh, because I didn't saw correctly the influence of the changes I made to the mesh. Now with all the mesh, I was able to make changes, to apply mesh smooth and see how it looks.Like in front with the smaller headlights, here I chamfer two edges, then extruded the faces: Then It came the second pair of headlights (see in the pictures how I deleted some face then created them again with different diagonal): I sliced the middle faces between the backlights to create some room for the registration number: After that I started to work with ...
اموزش ساخت یه رادیو کنترل ساده و کوچک!!!
اما کم کم طراحی رو شروع کنیم:با مراجعه به دیتاشیت آی سی اول می بینیم که تمام شماتیک مدار مورد نظرمون یعنی همون فرستنده مادون قرمز یا Remote Control اونجا هست و هیچ نیازی به این نیست که تغییراتی رو اعمال کنیم.صرفا مساله طراحی PCB می مونه که از این بحث خارجه.و اما شماتیک:همونطور که توی این شماتیک می بینید ما می تونیم یه ریموت کنترل 18 کلیده داشته یاشیم که کلید ها بصورت ماتریسی روی آی سی قرار می گیرند.و بصورت سه سطر در شش ستون چیده می شند.در مورد R توی شماتیک (روی بیس ترانزیستور) مقاومت 680 یا 820 اهم رو انتخاب می کنیم.و همچنین در مورد ترانزیستور 2SA1015 انتخاب میشه.IR LED رو هم که میدونید یه LED مادون قرمز معمولی فرستنده (شفاف) میندازیم.فکر نمی کنم در مورد مدار فرستنده دیگه مشکلی وجود داشته باشه بجز اینکه رنج تغذیه مدار بسیار جالب هستش... 2.2 ولت تا 5 ولت.پس به راحتی می تونید از باتریهای معمولی که توی این رنج ولتاژ هستند استفاده کنید.و اما مدار گیرنده.با مراجعه به دیتا شیت این آی سی چیز زیادی جز نحوه بستن تغذیه آی سی و پین های کنترلی دستگیرمون نمیشه.اینجا یه نکته پیش میاد و اون اینکه از حالا باید نیاز خودتون رو تعیین کنید.به این معنی که باید بدونید به 10 کانال نیاز دارید یا 18 تا.چون برای داشتن 10 کانال باید از آی سی PT2249 و برای داشتن 18 کانال از آی سی PT2250 استفاده کنید.فعلا شماتیک های مربوط به هرکدوم رو که از دیتاشیت بیرون کشیدم رو ببینین:همونطوری که توی شکل ها می بینید پین هایی از آی سی ها که توی قسمت Control Signal Output قرار گرفتن پین های مربوط به خروجی های مدار ما هستند که توی اولی دو تا و در دومی 18 تا هستن.سلام مجدد.خوب میرسیم به قسمت طراحی:این آی سی و به عبارتی مدار گیرنده ما سه قسمت عمده داره:1-قسمت تغذیه آی سی2-قسمت گیرنده یا همون سنسور مادون قرمز3-خروجی مداربرای هرکدوم جدا گانه طراحی رو انجام میدیم.بیاید اول از قسمت خروجی شروع کنیم.چون هم از اون دوتای دیگه کار بیشتری میبره و هم سخت تره.(حالا میگم چرا)برای این کار قبل از هرچیز باید بدونیم که خروجی ما هر به هرالمان الکتریکی و الکترونیکی که قدرت سوئیچ کردن یا فرمان دادن رو داشته باشه میتونه وصل شه.از جمله رله ، ترانزیستور ، تریاک ، میکرو و...اما بیاید فرض کنیم که میخوایم این خروجی ها رو به رله بدیم.یا یکم عامیانه ترش اینکه فرضا می خوایم وسایلی مث لامپ های خونه یا تلوزیون و ... رو خاموش و روشن کنیم.بقیه المانهای مورد اشاره هم برای وصل شدن به آی سی مشکلی ندارن.ولی حالا بریم روی مدار:همونطور که می بینید یک دونه از مدار مربوطه رو روی پین 13 کشیدم و بقیه پین ها رو بعهده خودتون گذاشتم.درواقع همه پینها ...
آموزش ساده و روان avr
یک کتاب بسیار عالی از انتشارات جهاد دانشگاهی برای آموزش کاربردی و ساده ی avr (آسان و روان = avr) این کتاب با زبانی بسیار ساده مطالب رو توضیح داده و مثل بقیه ی کتاب ها شروع نکرده از رجیستر ها و چیزهای سخت شروع کنه . . . به صورت تصویری و گام به گام و عالی توضیح داده و برای کسی که بخواد کار با این میکروکنترلر ها رو شروع کنه عالیه کلا مهندس های برق باید با میکروکنترلر و آی سی های مختلف آشنا باشن و فقط قصد پاس کردن ترم های متوالی رو نداشته باشن. . . با این میکروکنترلر ها هم میشه ربات های مختلف ساخت هم میشه پروژه های جالب مثل ضربان نبض سنج ، دما سنج ، ماشین حساب ، ماشین کنترلی ، نمایشگر های مختلف ، تابلو های روان و ثابت و . . . ساخت. کلا میکروکنترلر یه چیز جالب و بسیار کاربردیه!!!! این کتاب رو میتونید از انقلاب تهیه کنید . . . یا از طریق لینک زیر سفارش اینترنتی بدید http://jdbook.ir/Pages/BookDetail.aspx?itemid=67271&editionid=76586 سعی کردیم کتاب بسیار ساده و عملی نوشته بشه ولی اگر هر جای آن را متوجه نشدید به ما ایمیل بزنید تا بهتون کامل توضیح بدیم
قابلیت های ویژه نرم افزار EMC2 ( قسمت اول)
این نرم افزار از یک نرم افزار ساده کنترلی است و شامل قابلیت های منحصر به فردی است . از توانایی های کم نظیر این نرم افزار تبدیلفایل های فرمت عکس (png , jpeg ,...) به Gکد است. از این قابلیت می توان برای حکاکی آرم های مختلف بدون نیاز به طراحی و Gکد گیری و بدون استفاده از نرم افزار های CAD ،CAM استفاده کرد . از قابلیت های دیگر این نرم افزار HALLSCOP است که به کار بر توانایی نمایش و ذخیره ی تمامی ورودی و خروجی ها در پین ها را می دهد . از آن میتوان مانند یک اسیلوسکوپ با قابلیت ذخیرهسازی اطلاعات استفاده کرد . از قابلیتهای مهم و پرکاربرد این نرم افزار کنترل سروموتور می باشد که با نصب کارت هایی مانند AX5214H یا m5i20 یا SERVO-TO-GO می توان در یک لوپ بسته و استفاده از خطکش یا انکودر سروموتور را کنترل کرد .
موتور های سوختی هواپیما
شیر سوزنی کنار موتور را که مقدار سوخت را تنظیم میکند کاملا ببندید و سپس به اندازه سه دور کامل آن را باز کنید (جهت عقربه ساعت بسته میشود و خلاف جهت عقربه ساعت بازمیشود).انگشت شست خود را بر روی Carb قرار دهید (Carb در حقیقت همون کاربراتور هست که در اینجا قسمت عبود هوا از خارج به داخل مورد نظر است و شما باید با انگشت شست این قسمت را به صورت دستی موقتا مسدود کنید) سپس در همین حال چند بار با دست دیگرتان ملخ را بچرخانید تا اینکه سوخت در مسیر بین مخزن تا کاربراتور قرار بگیرد. (به این قسمت بیشتر دقت کنید: برای انتقال سوخت به کاربراتور توجه داشید که به هیچ عنوان باتری سر شمع را هنوز وصل نکرده باشید به شمع موتور چون در صورت روشن شدن موتور، به انگشتانتان صدمه وارد میشود. ضمنا برای انتقال سوخت به کاربراتور وقتی ملخ را تا حدی میچرخانید در مرحله ای از چرخش ملخ گیر میکند که این همان زمانی است که مکش سوخت از مخزن انجام میشود و در این لحظه اگر انگشتتان را از روی کاربرات بردارید سوخت بهتر هدایت میشود، همینکار را باید آنقدر انجام دهید تا سوخت را در داخل شیلنگ ارتباطی بین مخزن تا کاربراتور مشاهده کنید.)در صورتی که هر کدام از سه عمصر بالا وجود نداشته باشد و موتور شما روشن نخواهد شد. کارکرد موتورهای دو زمانه: کاکرد یک موتور دو زمانه نسبتا ساده است. میل لنگ موتور یک چرخش کامل را در هر سیکل نیرو میسازد، در طی حرکت پیستون به سمت بالا، مخلوط هوا و سوخت در بالای آن جهت اشتعال فشرده میشود، در همان زمان یک مخلوط تازه به سوی Crankcase (پائین پیستون) انتقال پیدا میکند. پس از اشتعال پستون اجبارا با سرخت به صرف پائین حرکت میکند و دود به وجود آمده از بندر اگزوز خارج میشود، در همان زمان یک مخلوط سوخت و هوای دیگرتوسط Carb به سوی Crankcase انتقال پیدا کرده است. دریچه ورودی بسته شده است و مخلوط اجبارا توسط بندرهای انتقال، به قسمت بالای استوانه پیستون انتقال پیدا میکند تا یک چرخه نیروی جدید شروع شود. رابط های انتقال سوخت (شلنگ ها) نصب مناسب راه های ارتباطی سوخت بسیار مهم است. شلنگ ها برای قطعات بزرگ باشند ممکن است باعث خاموش شدن موتور در هنگام پرواز بشوند، وقتی شیلنگ نسبت به محل اتصالش بزرگتر باشد و به محل اتصال شل وصل باشد، باعث نشت هوا به داخل سوخت میشود و حباب های هوا که جای سوخت را میگیرند باعث بد کار کردن موتور و حتی خاموش شدن آن خواهند شد (حباب های هوا در داخل شلنگ در حالی که موتور روشن است به چسم دیده میشوند و تشخیص آنها جهت رفع عیب ساده است).همچنین طول شیلنگ ها باید به قدری بلند باشد تا به حالت کششی قرار نگیرد چون در این حالت احتمال مسدود شدن شلنگ و ...
نقش PLC در اتوماسیون صنعتی
اتوماسیون صنعتی نقش PLC در اتوماسیون صنعتی با توجه به پیشرفت بسیار سریع تکنولوژی و وجود رقابتهای شدید در بین صنعتگران دو مقولة دقت و زمان در انجام کارهای تولیدی و خدماتی بسیار مهم و سرنوشت ساز شده است. دیگر سیستمهای قدیمی جوابگوی نیازهای صنعت توسعه یافتة امروز نبوده و بکار بردن سیستمهایی که با دخالت مستقیم نیروی انسانی عمل می کنند، امری نامعقول مینمود. چرا که در این موارد دقت و سرعت عمل سیستم بسیار پایین و وابسته به نیروی کاربر است. بنابراین ماشینهای هوشمند و نیمههوشمند وارد بازار صنعت شدند. و بعد از مدتی آنچنان جای خود را پیدا کردند که علاوه بر زمینههای صنعتی در کارهای خدماتی نیز جایگاه ویژهای یافتند. کنترل سیستمهای بسیار پیچیدهای که قبلاً غیرممکن بود براحتی انجام میگرفت . مکانیزه کردن سیستمها و ماشین آلات (اتوماسیون صنعتی ) مقوله بسیار مهم و پرطرفداری شده و نیاز به آن هر روز بیشتر و بیشتر مشهود میشود . اتوماسیون صنعتی در زمینههای بسیار گستردهای کاربرد دارد از مکانیزه کردن یک ماشین بسیار سادة کنترل سطح گرفته تا مکانیزه نمودن چندین خط تولید و شبکه کردن آنها با هم . با نگاهی به محیط اطرافمان میتوانیم نمونههای بسیار زیادی از کاربرد اتوماسیون ا را در اغلب زمینهها پیدا کنیم.. در اتوماسیون واحدهای مسکونی جدید ، در شبکههای مخابراتی ، در سیستمهای دفع فاضلاب ، سیستم توزیع برق ، کارخانجات مختلف و ... در یک سیستم اتوماسیون شده کنترل پروسه توسط ماشین انجام میشود و در این سیستمها دخالت انسان به حداقل و در برخی موارد به صفر رسیده است. سیستم با گرفتن سیگنالهای ورودی از قطعاتی نظیر سنسورهای تشخیص فشار ، رنگ ، سطح مایعات ، قطعات فلزی ، سنسورهای دما ، میکرو سوییچها ، کلیدها و شستیها ، واسط های کاربر با ماشین و... وضعیت موجود را حس کرده و بررسی میکند و سپس در مورد عکسالعمل ماشین تصمیمگیری کرده و فرمانهای لازمه را به قطعات خروجی که تحت کنترل ماشین هستند اعمال میکند. با توجه به مواردی که ذکر شد میتوان ساختار یک سیستم اتوماسیون را بدین صورت لیست نمود: قطعات ورودی شامل سنسورها ، سوییچها ، ... قطعات خروجی مثل موتور ، پمپ ، شیربرقی ، نشانگرها ... یک کنترلر داخلی با CPU برای پردازش دادهها و اجرای برنامة کنترلی سیستم و حافظه برای ذخیره نمودن برنامة کنترلی و اطلاعات دریافتی از قطعات ورودی یک واسط بین کاربر و ماشین Human Machine Interface ( در مواردی که نیاز به انجام تنظیمات توسط کاربر داریم و یا میخواهیم یکسری اطلاعات و آلارمها را به اطلاع کاربر برسانیم .) توجه داشته ...