پایان نامه برق کنترل
جزوه سیستم های کنترل خطی (دانشگاه منتظری مشهد)
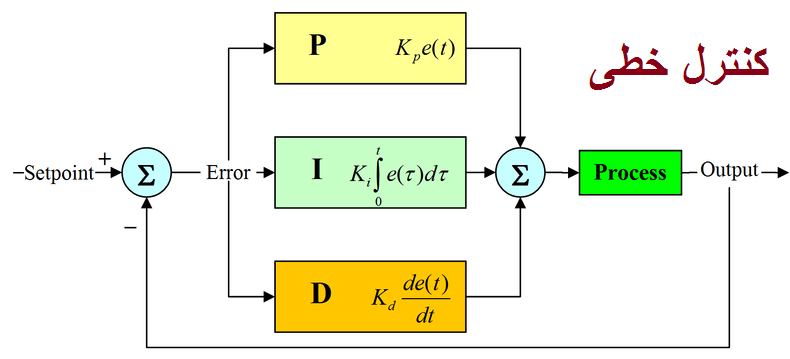
انواع سیستم کنترل: کنترل فرآیند: سیستمهایی که در آن ورودی دارای تغییرات نسبتا کند و در یک محدوده مشخص هستند و عامل اغتشاش تاثیر زیادی بر پروسه دارد سیستمهای کنترل فرایند نامیده میشوند. (مانند: پروسه کنترل دما، کنترل رطوبت، کنترل نور و…) سرو مکانیزم: سیستمهایی هستند که در آنها خروجی مورد نظر، سرعت یا موقعیت یا گشتاور است در این گونه سیستمها تغییرات خیلی سریع و دامنه نا مشخصی دارد. انواع فیدبک: در سیستمهای حلقه بسته فیدبک می تواند بصورت مثبت یا منفی باشد و در سیستمهای کنترل فیدبک مثبت باعث ناپایداری و انهدام سیستمها می شود بنابراین همواره از فیدبک منفی استفاده می شود. اجزا اصلی یک سیستم کنترل: بطور کلی برای هر سیستم می توان سه جز اصلی در نظر گرفت که عبارتند از: ۱- سنسور ۲- کنترلر ۳- محرک سنسور مانند چشم در یک سیستم کنترلی عمل میکند.کنترلر بمانند مغز و محرکها بازوان یک سیستم کنترلی هستند. کنترل کننده ها: کنترل کننده ابزاری است که با توجه به خطای موجود ( اختلاف رفتار پروسه با رفتار مطلوب ) و با در نظر گرفتن قوانین کنترل که طراح به آن یاد داده است. دستوری را جهت اصلاح و هدایت پروسه به آن اعمال می کند. کنترل کننده ها از نظر مورد استفاده به سه دسته الکتریکی، پنوماتیکی و هیدرولیکی تقسیم می شوند و از نظر قانون کنترل دارای انواع زیر هستند. ۱- دو وضعیتی (on-off) 2- تناسبی (proportional) 3- انتگرالی (integral) 4- مشتقی (derivative) 5- تناسبی مشتقی PD 6- تناسبی انتگرالی PL 7- تناسبی انتگرالی مشتقی PID سرفصلهای جزوه سیستم های کنترل خطی… فصل اول: آشنایی با سیستمهای کنترل تعاریف اولیه سیستمهای کنترل خطی انواع سیستم کنترل انواع سیستم کنترل از نظر استراتژی کنترل انواع فیدبک اجزا اصلی یک سیستم کنترل تبدیل لاپلاس تجزیه کسر به عاملهای اول بصورت گرافیکی فصل دوم: مدلسازی ریاضی سیستمهای فیزیکی روشهای نمایش و مدل کردن سیستمهای کنترلی نمایش به صورت HODE انواع متغییرها در سیستمهای فیزیکی خواص سیستمهای خطی خطی کردن سیستمهای کنترل حول نقطه کار نمایش سیستم بصورت TF تابع تبدیل دیاگرام بلوکی فرآیندهای الکترومکانیکی نمودار گذر سیگنال فصل سوم: مدلهای متغییر حالت برای سیستمهای فیزیکی نمایش سیستمها بصورت فضای حالت یا state-space فرم کلی نمایش متغییرهای حالت حل معادلات حالت و ماتریس انتقال(گذرا) حالت (state transition matrix) تعریف ماتریس انتقال حالت دستیابی به تابع تبدیل از معادلات حالت نمودار حالت SD تبدیل معادله دیفرانسیل به نمودار حالت تبدیل نمودار حالت به تابع تبدیل تبدیل نمودار حالت به معدلات حالت فصل چهارم: مشخصات سیستم کنترل پسخوردی کاهش اثر اغتشاش کاهش حساسیت ...
رله کنترل فاز

در گذشته در مدارات حساس بصورت کنتاکتوری برخی عیوب مشخص می شد و چراغ ها و زنگ های آلارم فعال می گردید و برق شبکه قطع ، ولی این مدار قادر نبود که کلیه عیوب راتشخیص دهد از طرف دیگر قابل استفاده درکلیه اماکن و تابلوهای برق هم نبود. با پیشرفت علم الکترونیک این عیوب مورد بررسی قرار گرفتند و در نهایت دستگاهی به نام رله کنترل فاز ساخته شد که متناسب با شرکت سازنده مجهز به امکانات کمتر یا بیشتر می باشد رله کنترل فاز باید عیوب زیر را تشخیص می دهد : 1- قطع شدن فازها ( یک فاز ، دو فاز و یا هر سه فاز ) یا سیم نول 2- تغییر توالی فازها 3- افزایش یا کاهش بیش از حد مجاز ولتاژ 4- عدم تقارن بیش از حد ولتاژ سه فاز 5- شوک های ناشی از قطع و وصل برق رله های کنترل فاز دارای یک بوبین می باشند که در صورت صحت کلیه شرایط عمل نموده و تیغه باز خود را می بندد در نتیجه این تیغه باید در مسیر مدار فرمان قرار گیرد . برای تشخیص رله از وضعیت برق شبکه باید هر سه فاز و سیم نول وارد رله کنترل فاز گردد در نتیجه به یک رله کنترل فاز حداقل 5 سیم متصل است . تشریح رله کنترل فاز شرکت میکرو : این رله دارای 7 پیچ اتصال می باشد که به ترتیب عبارتند از : 1- l1و l2 و l3 که به ترتیب به سه فاز متوالی شبکه متصل می شوند 2- mp ترمینال سیم نول می باشد که باید به سیم نول متصل گردد . 3- ترمینال شماره 15 ، 16 و 18 که پیچ کنتاکتها در مدار فرمان می باشند این رله دارای 5 LED می باشد - دو LED سبز و سه LED قرمزکه به ترتیب عبارتند از : 1- LED سبز با علامت U : در صورت اتصال سه فاز و سیم نول به رله این چراغ روشن می شود . 2- LED سبز با علامت R :در صورت عملکرد صحیح رله این چراغ روشن می شود . 3- LED قرمز با علامت P : در صورت قطع فاز یا فازها و قطع سیم نول یا جابجائی فازها و یا پائین بودن درجه حساسیت رله این چراغ خطر روشن می شود . 4- LED قرمز با علامت U< : در صورت خطای کاهش ولتاژ شبکه این چراغ به عنوان چراغ خطا روشن می شود . 5- LED قرمز با علامت U> : در صورت خطای افزایش ولتاژ شبکه این چراغ به عنوان چراغ خطا روشن می شود . این رله دارای 3 رنج تنظیم می باشد که به ترتیب عبارتند از : 1- زمان تاخیر در وصل : که از 1 تا 30 ثانیه قابل تنظیم است و بر روی هر زمانی که تنظیم شود ، در صورت صحت کلیه موارد بعد از زمان انتظار ( زمان تنظیم شده ) رله عمل خواهد کرد و چراغ R روشن می شود .این متن برگرفته از سایت مهندسی برق قدرت و شبکه های انتقال و توزیع مهندس هادی حداد خوزانی می باشد 2- زمان تاخیر در قطع : زمان عکس العمل رله (قطع رله) در موارد بروز عیب بر اساس زمان تنظیم شده توسط این رنج تنظیم ، مشخص می شود . این زمان در این مدل رله از 1 تا 15 ثانیه تنظیم می شود ...
دانلود جزوه کامل مدار فرمان
کارگاه مدار فرمان برای دانشجویان رشته برق علل خصوص یک تکنسین برق تنها یک درس تلقی نمی شود بلکه شاید شغل او در گرو این کارگاه باشد.گرچه امروزه PLC و الکترونیک قدرت تا حدودی جایگاه مدار فرمان یا همان مدارات کنتاکتوری را گرفته اند اما باید فراموش نکنیم پایه و اساس مدارات فرمان هنوز در هر کارخانه ای یافت می شود.هر دانشجویی که بتواند نحوه طراحی یک مدار فرمان ، نحوه نقشه خوانی و نحوه عیب یابی یک مدار فرمان را فرا گیرد بی شک ازکسی که سررشته ای در مدارات فرمان ندارد در زمینه طراحی مدارات PLC قوی تر است. مدارات فرمان غیر از دانشگاه ها در مراکز فنی حرفه ای نیز تدریس می شود.فایلی که برای شما عزیزان آماده شده است جزوه سازمان فنی حرفه ای در زمینه طراحی مدارات فرمان می باشد.در این فایل بیش از ۱۰۰ نوع مدار فرمان تحلیل و بررسی شده است. فهرست: علایم اختصاری لازم در مدارات فرمان وسایل حفاظتی در مدارات فرمان نقشه مسیر جریان و نقشه مونتاژ در مدارات فرمان راه اندازی دو موتور سه فاز یکی پس از دیگری راه اندازی موتور سه فاز به صورت ستاره مثلث راه اندازی موتور سه فاز به صورت ستاره مثلث با قابلیت تغییر جهت گردش موتور(چپگرد راستگرد ستاره مثلث) راه اندازی موتور دالاندر راه اندازی و تغییر جهت گردش موتور دالاندر (دالاندر چپگرد راستگرد) دالاندر با تغییر دور اتوماتیک و تغییر جهت گردش راه اندازی یک موتور سه فاز با رتور سیم پیچی با حلقه های لغزنده به صورت دستی راه اندازی یک موتور سه فاز با رتور سیم پیچی با حلقه های لغزنده به صورت دستی به صورت اتوماتیک شناخت مشخصات فنی کنتاکتور راه اندازی موتورهای سه فاز با کلیدهای اهرمی ، غلطکی و زبانه ای و... دانلود رمز فایل:www.power-jam.ir
رله ی کنترل فاز و طریقه ی نصب آن

کاربرد رله اضافه جریان سه فاز (کنترل بار) جایگزینی مناسب برای رله های بی متال است که در موارد زیر کاربرد دارد: _ جلوگیری از سوختن موتورهای سه فاز در هنگام اضافه بار٬ دو فاز شدن و اتصال کوتاه حفاظت ژنراتورها و ترانس های قدرت در مقابل اضافه بار و اتصال کوتاه . _ حفاظت موتورهای تک فاز و دو فاز (استفاده از یک یا دو کانال جریان) . مشخصه های کنترل بار : ۱٫ جایگزین بیمتال ۲٫ مدار الکترونیکی با عمر بسیار زیادو بدون استهلاک مکانیکی ۳٫ دقیق و مطمئن در تمامی شرایط و عدم وابستگی به دمای محیط ۴٫ قابلیت تنظیم جریان توسط دسته ی ampers 5. دارای تایمر تاخیر در وصل با زمان ثابت ۶٫ قابلیت تنظیم تاخیر در قطع توسط دکمه ی delay 7. دارای دو حالت عملکرد قفل شونده و اتوماتیک ۸٫ قابلیت های ویژه a) نمایش دهنده ی حالت خط قبل از قطع خروجی b) دارای نمایشگر وصل خروجی c) دارای نمایشگر حالت خطا fault طرز کار رله کنترل باربا داشتن سه عدد ترانس جریان داخلی جریان هر یک از کانال های جریان را مانند آمپرمترهای انبری اندازه گیری کرده و باجریان تنظیم شده مقایسه می کند و در صورت اضافه شدن جریان هر خط از مقدار تنظیم شده مصرف کننده رااز مدار خارج می کند . برای پوشش دادن زمان استارت در موتورهایی که اضافه بار زیادی دارند پیچ تنظیمی بر روی رله برای تنظیم زمان تاخیر پیش بینی شده است. طریقه ریست کردن رله بعد از اینکه رله عمل کرد باید رله ریست شود تا به حالت کار عادی بازگردد. ریست کردن کنترل بار به سه طریق قابل انجام است: ۱- با استفاده از دکمه ریست روی دستگاه ۲- با قطع مدار تغذیه رله برای چند لحظه ۳- ریست اتوماتیک که با اتصال دو ترمینال T1 و T2 بعد از حدود یک دقیقه به طور خودکار انجام میشود. طریقه ی نصب برای این کار کافی ا ست سه سیم حامل جریان فازها را از سه کانال مجزای رله عبور داده و ترمینال های ۱۵ و ۱۶ را در مدار فرمان کنتاکتور به صورت سری قرار دهیم از ترمینال ۱۸ میتوان برای دستگاههای هشدار دهنده هنگام قطع استفاده کرد. تغذیه دستگاه توسط دو ترمینال A1 و A2 انجام میشود . توجه: جهت عبور جریان از داخل کانالها تاثیری در کارکرد کنترل بار ندارد. مزیت نسبت به بی متال بی متال ها به علت عملکرد حرارتی زمان عکس العمل طولانی تری دارند و عملکرد آنها تا حدود زیادی وابسته به دمای محیط است ٬ در مقابل کنترل فازها به دلیل عملکرد القایی واستفاده از مدارات الکترونیکی دارای زمان عکس العمل سریع بوده و حرارت محیط بر کار آن تاثیر نمی گذارد منبع: vahedcontrol.blogfa.com
سرو موتور
دانلود رمز:www.power-jam.ir
لیست اول پایان نامه های کارشناسی و کارشناسی ارشد برق
برای دریافت فهرست و اطلاعات کافی بر روی کد پایان نامه مورد نظر کلیک کنید. ایمیل: [email protected] کد عنوان پروژه صفحه قیمت(تومان) 1 پروژه بررسی سیستم اتصال به زمین 55 7000 2 پایان نامه بررسی ادوات FACTS 62 10000 3 پایان نامه بررسی ترانسفورماتورهای ابر رسانا 95 12000 4 پایان نامه بررسی پایداری دینامیکی سیستم های قدرت الکتریکی و طراحی پایدار کننده های مقاوم 150 12000 5 پایان نامه بررسی جبران سازی توان راکتیو با ادوات FACTS 66 10000 6 پایان نامه نیروگاه های خورشیدی 170 12000 7 پایان نامه بررسی جریان هجومی ترانسفورماتور و حفاظت ترانسفورماتور قدرت در مقابل آن 90 8000 8 پایان نامه بررسی اثرات هارمونیکهای ولتاژ و جریان بر روی ترانسفورماتورهای قدرت 135 12000 9 پروژه بررسی روشهای مختلف جایابی بهینه خازن در شبکه قدرت 54 8000 10 پایان نامه بررسی جایابی بهینه خازن های شبکه توزیع بر اساس الگوریتم ژنتیک 120 10000 11 پایان نامه بررسی جايابي بهينه منابع تولید پراکنده توسط الگوريتم ژنتيك 127 12000 12 پایان نامه بررسی جایابی منابع تولید پراکنده با در نظر گرفتن معیار امنیت ولتاژ و کاهش تلفات شبکه 139 12000 13 پایان نامه فیلترها و اثر هارمونیکها بر روی موتورهای AC 106 12000 14 پایان نامه بررسی روشهای کنترل توان راکتیو در خطوط انتقال انرژی 115 10000 15 پروژه طراحی و پیاده سازی سیستم کنترل شارژ صفحات خورشیدی 51 10000 16 پایان نامه بررسی سیستمهای حفاظتی در پستهای فشار قوی 185 12000 17 پایان نامه مدلسازی و شبيه سازي Rectifier وInverter خطوط HVDC 215 15000 18 پایان نامه سیستمهای کنترلی , اتوماسیونی و تله متری 160 12000 19 پایان نامه بررسی کیفیت انرژی و توان در سیستمهای قدرت و بخش توزیع 130 15000 20 پایان نامه بررسی شکست الکتریکی عایقهای گازی 115 10000 21 پایان نامه مقایسه کلیدهای SF6,و خلاء در سطح ولتاژ پایین 71 10000 22 پایان نامه بررسی و طراحی جبران کننده های توان راکتیو برای شبکه قدرت بر اساس برآورد بار و طرح های توسعه شبکه برق 150 12000 23 پایان نامه سیستمهای کنترل هوشمند ساختمان(BMS) 127 12000 24 پایان نامه رله های دیجیتالی و کاربرد آنها در حفاظت الکتریکی 140 12000 25 پایان نامه عملکرد کلیدهای قدرت در پستهای فشار قوی 135 12000 26 پروژه شبکه های قدرت الکتریکی 180 12000 27 پروژه ارزیابی قابلیت اطمینان در سیستمهای قدرت و جنبه های توان راکتیو در ارزیابی قابلیت اطمینان 73 10000 28 پروژه انواع رله های حفاظتی و کاربرد آنها 55 7000 29 پایان نامه جبران کننده های بار در سیستمهای فوق ...
پایان نامه آسانسور و بررسی موتورهای آن
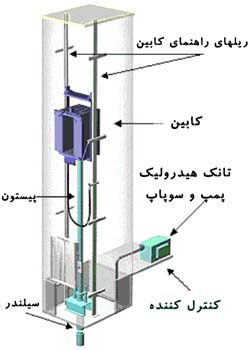
فهرست: مقدمه تاریخچه پیدایش آسانسور فصل ۱- موتورهای آسانسور ۱-۱- انواع آسانسور ۱-۱-۱- آسانسورهای هیدرولیک ۱-۱-۲- آسانسورهای کابلی یا کششی ۱-۲- انواع سیستم های محرکه آسانسور ۱-۲-۱- موتورهای گیربکس (Geared Machines) 1-2-2- نحوه کاهش سرعت توسط گیربکس ۱-۳- گیربکس، ساختمان (اجزاء) و عملکرد ۱-۴- محدودیتهای استفاده از ماردون و چرخ دنده ۱-۵- محل قرار گرفتن ماردون نسبت به چرخ دنده، محاسن و معایب ۱-۶- انواع موتورهای گیربکسی ۱-۶-۱- موتورهای گیربکسی تک سرعته کشش ۱-۶-۲- موتورهای گیربکسی دو سرعته کشش ۱-۶-۳- موتورهای گیر بکسی ولتاژ متغیر کشش ۱-۷- موتورهای بدون گیربکس ۱-۷-۱- آسانسورهای بدون گیربکس با موتورهای سنکرون و آسنکرون ۱-۷-۲- آسانسورهای بدون گیربکس فاقد موتورخانه (Roomless) 1-7-3- آسانسورهای بدون گیربکس برای ظرفیت های بالا ۱-۷-۴- کنترل الکتریکی موتور فصل ۲- کنترل سرعت موتورهای آسانسور ۲-۱- مقدمه ۲-۲- کنترل سرعت موتور مغناطیس دائم سنکرون (PM ) 2-3- کنترل دور موتور با VVVF وACVV 2-3-1- اجزاء سیستم کنترل دور VVVF 2-3-2- کنترل سرعت موتورهای سنکرون با درایو VVVF (سیستم کنترل تنظیم فرکانس- ولتاژ ) ۲-۳-۳- تکنولوژی درایو برداری ۲-۳-۴- انتخاب اندازه درایو ۲-۴- کنترل اینورتری اولیه ماشین های AC 2-5- حفاظت کنترل دور از موتور در برابر عوامل مخرب ۲-۵-۱- بهینه سازی مصرف انرژی ۲-۶- موتورهای تک سرعته آسانسور جایگزین موتورهای دوسرعته. فصل ۳- سیستم کنترل فرمان آسانسور ۳-۱- سیستم های کنترل فرمان آسانسور ۲-۳- نسل جدید تابلو فرمان آسانسور (میکرو کنترلر جایگزین میکروپروسسور ) ۳-۲-۱- سرعت پردازش میکرکنترلر درآسانسور ۳-۲-۲- سرعت نهایی پردازش در کنترل کننده ها ۳-۳- مدار و برنامه آسانسور با میکروکنترلر ۳-۳-۱- مدار و برنامه آسانسور با میکروکنترلر pic16f877 با ۵ طبقه و سون سگمنت ۳-۳-۲- مدارآسانسور۳ طبقه با شناسایی اولیه ومدار استوپ ومدار رویزیون میکروکنترلری ۳-۴- آسانسور دوبل هوشمند با میکروکنترلر ۳-۴-۱- سخت افزار سیستم ۳-۴-۲- نرم افزار سیستم فصل ۴- اجزاء سیستم کنترلی آسانسور ۴-۱- کنتاکتور ها در تابلو فرمان آسانسور ۴-۱-۱- مشخصات پلاک کنتاکتور ۴-۲- سیستم درب بازکن اتوماتیک آسانسور ۴-۳- سیستم ترمزالکتریکی آسانسور ۴-۴- سیستم درایو کنترل سرعت آسانسور ۴-۴-۱- نقاط ضعف و قوت آسانسورهای کم سرعت، مجهز به درایوکنترل سرعتVVVF 4-4-2- نکات مهم در نصب سیستم های مجهز به VVVF 4-4-3- موارد حفاظتی در مورد درایو کنترل سرعت ۴-۵- دستگاه نجات اضطراری آسانسور ۴-۵-۱- مجموعه باطریها ۴-۵-۲- اینورتر تک فاز ۴-۵-۳- کنترل خروج ۴-۵-۴- اینورتر قدرت برای موتور اصلی ۴-۵-۵- تغذیه و کنترل درب ۴-۶- سیستم روزیون ۴-۷- سنسورها فصل ۵- طراحی مدارات ...
جزوه کنترل صنعتی

سیستم کنترل اتوماتیک: اصولا به وسایلی اطلاق میگردد که در هر لحظه به طور اتوماتیک و خودکار و بدون کمک خارجی یک سلسله اعمال مدار را بررسی و اگر اختلافی در نتیجه پیش بینی شده داشته باشد آن را اصلاح کند. فرآیند: عبارت است از یک سری تحولات زنجیره ای که به سمت نتیجه مطلوب هد ایت میشوند. حوزه اندازه گیری (range): محدوده ای از دامنه تغییرات مورد اندازه گیری است که عنصر اندازه گیری قادر به اندازه گیزی آن باشد. بنابراین همواره باید اندازه گیری را انتخاب نمود که حوزه اندازه گیری آن دامنه تغییرات احتمالی کمیت مورد کنترل را تحت کنترل قرار دهد. صفر اندازه گیری: معمولا نقطه مشخصی را در حوزه اندازه گیری به عنوان نقطه صفر در نظر میگیریم. مثلا در اندازه گیری های حرارت نقطه صفر زمانی است که آب یخ میزند، و در اندازه گیری فشار، فشار اتمسفر به عنوان فشار صفر در نظر گرفته میشود. تقسیم بندی سیستمهای کنترل: سیستمهای کنترل به دو نوع حلقه باز و حلقه بسته تقسیم بندی می شوند. تغییرات ورودی ممکن است فقط براساس اطلاع از مدل سیستم و یا تجربه صورت گیرد و بدون اطلاع از خروجی باشد که در آن صورت سیستم را حلقه باز می نامند. در صورتی که عملیات و تغییرات ورودی براساس اطلاع از خروجی صورت گیرد سیستم را حلقه بسته و به آن سیستم کنترل فیدبک دار گویند. در کنترل حلقه باز ورودی براساس اطلاع قبلی از مدل سیستم به منظور ایجاد خروجی معین به سیستم اعمال میشود. کنترل کننده شکل سیگنال ورودی را به طور متناسب تغییر و تقویت میکند. قسمت محرک دارای توان زیاد بوده و براساس سیگنال دریافتی از کنترل کننده نیروی لازم را اعمال نموده و حرکات لازم انجام میدهد. در سیستم حلقه باز اثر خطای موجود در مدل سیستم یا تحریکات موجود غیر قابل پیش بینی است. خروجی دستگاه معمولا دارای مقداری خطا نسبت به مقدار مورد نظر خواهد بود. کنترل حلقه بسته: در اینجا عمل منترل براساس ورودی مرجع و خروجی صورت می گیرد. مقدار خروجی توسط اندازه گیر و مبدل به مقایسه کننده ارسال میشود و نتیجه مقایسه به عنوان سیگنال خطا به کنترل کننده اعمال می گردد. سرفصل های جزوه کنترل صنعتی : فصل اول : تعاریف و اصطلاحات در کنترل صنعتی فصل دوم : اندازه گیرهای وضعیت (مقاومتی ، سلفی ، خازنی ) روش های اندازه گیری دما روش های اندازه گیری فلو روش های اندازه گیری فشار روش های اندازه گیری سطح مایعات فصل سوم : فرایندهای صنعتی وبه دست آوردن تابع تبدیل آن ها ساده سازی نمودار جعبه ای فصل چهارم: سنسور های بدون تماس فصل پنجم : کنترل کننده ها کنترل کننده های PLC کنترل کننده های PID و ON/OFF دانلود رمز فایل:www.wikipower.ir