ربات ساده
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیر یاب بسازیم با سلام خدمت دوستان گلم که میخوان یک روبات مسیر یاب حرفه ای بسازن برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشین در این وبلاگ سعی میشود نحوه ساخت یک ربات مسیر یاب به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود خوب بریم سر اصل مطلب که قراره در مورد مکانیک یک ربات مسیر یاب که فکر میکنم ساده ترین قسمت یک ربات مسیر یاب باشه توضیح بدیم مکانیک مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد 2- موتور ربات مسیر یاب 3- چرخ ربات مسیر یاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد خوب دیگه بسه بریم سر اصل مطلب که میخوایم یکی یکی این اجزای مکانیکی رو تجزیه و تحلیل کنیم شاسی یا بدنه این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از : DC MOTOR Steper Motor شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید یک ربات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتونستید این جور موتوری را تهیه کنید میتوانید از یک آلمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ) که من توصیه میکنم این جور موتور هایی رو از این سایت که موتور های خوبی واسه این کار داره و هم ایرانی هست هم خیلی سریع بدستدون میرسه تهیه کنید : www.Shop.Farsitools.com Is Shoping Robotic چرخ ها در ساخت این جور رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از : -1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطحکاک چرخ با زمین 1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند ...
آسان ترین ربات تعقیب گر نور بدون میکرو و با قطعات ساده

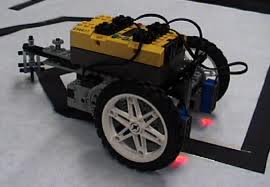
شما در ابن pdf می توانید آموزش ساخت آسان ترین ربات تعقیب گر نور را ببینید که در اون از قطعات ساده استفاده شده است توضیح در باره ی ربات تعقیب گر نور : این روبات می تواند در محیط به دنبال منبع نور بگردد و هوشمندانه به سمت آن حرکت کند برای دانلود روی عکس کلیک کن
دانلود کتاب "آموزش ساخت ربات ساده"

نام کتاب: آموزش ساخت ربات سادهنویسنده: ا.بمنبع: مرجع دانلود کتابتعداد صفحات: ۱۵ صفحهحجم فایل: ۴۷۰ کیلوبایتفرمت کتاب: پی دی افتوضیح مختصر: در این کتاب به صورت تصویری و گام به گام با نحوه ساخت یک ربات ساده در ۱۵ مرحله بدون نیاز به برنامه نویسی آشنا می شوید. رمز فایل زیپ: bia2pdfbooks فرمت فایل: zipکلید واژه: دانلود کتاب جالب و زیبای ساخت یک ربات ساده در طی ۱۵ مرحله بدون نیاز به برنامه نویسی - دانلود کتاب های خلاقیت و نوآوری - مرجع دانلود کتاب های علمی به صورت پی دی اف - چگونه یک ربات بسازیم؟
آموزش ساخت ربات مسیر یاب
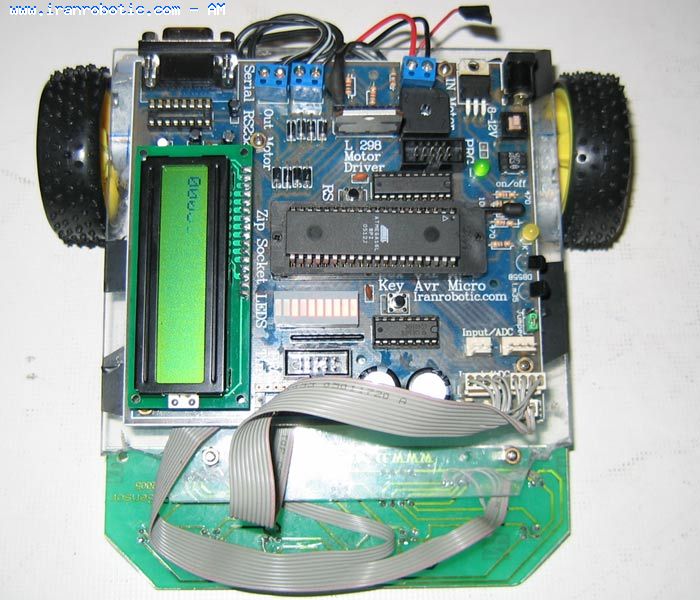
چگونه یک ربات مسیریاب بسازیم : مقدمه : برای ساختن یک ربات باید آشنایی مقدماتی با 3 رشته مکانیک ، برنامه نویسی و الکترونیک آشنایی داشته باشیم . البته نیازی نیست در تمامی این رشته ها خود تسلط داشته باشیم چنانچه شما عضو یک تیم هستید هریک از اعضای تیم باید در مهارت خود تسلط داشته باشند تا شما به نتیجه دلخواه و ایده آل خود برسید . در اینجا روش ساخت یک ربات همچنین تجربیاتی را که در این زمینه کسب کرده ام در اختیار شما قرار خوا هم داد . همانطور که گفته شد بحث ما شامل سه بخش است . 1. مکانیک2. الکترونیک3. برنامه نویسی مکانیک در مکانیک یک ربات مسیر یاب چند بخش وجود دارد مکانیک ربات مسیر یاب جزء ساده ترین مکانیک ها محسوب می شود این مکانیک شامل بخش های زیر است. 1. شاسی (یا بدنه ) که تمام اجزاء روی آن قرار خواهند گرفت.٢. موتور ها٣. چرخ ها۴. برد سنسور 1. شاسی یا بدنه : اینستف بخش در ساده ترین حالت می تواند یک طلق پلاستیکی یا چوب (تخنه سه لا) باشد که نسبتا سبک بوده و استحکام خوبی دارد . برد الکترونیکی شما روی آن پیچ می شود و موتور ها وچرخ ها به آن وصل می شود و برد سنسور در جای خود قرار می گیرد . 2. موتور ها : موتور های ربات یکی از مهمترین اجزاء ربات محسوب می شوند از سه نوع موتور می توان برای ربات استفاده کرد . موتور هایی که باید در این ربات ها استفاده شوند از نوع DC Motor می باشند و مستقیماً نمی توان آنها را به چرخ وصل کرد مگر اینکه توسط گیرباکس از سرعت آنها کم شود و به قدرت آنها اضافه شود. 1. موتور های اسباب بازی ها و گیرباکس آن ها در ساده ترین حالت شما می توانید گیرباکس اسباب بازی ها را باز کرده و از آن ها استفاده کنید فقط اگر از این روش استفاده می کنید دقت کنید گیرباکس ها کاملاً روان باشند و موتور ها نیز جریان کشی بالایی نداشته باشد . اگر موتور ها جریان کشی بالایی دارند بهتر است از یک موتور دیگر استفاده کرد . ٢. گویی وپولی : روش دیگری که می توان استفاده کرد استفاده از گویی وپولی ها است که از تسمه برای وصل کردن وتبدیل دور استفاده می شود این روش هم خالی از مشکل نیست این روش توصیه نمی شود . ٣. موتور های گیرباکس دار : در این موتور ها موتور و گیرباکس داخل یک مجموعه قراردارند و در دورهای مختلف با توان های مختلف عرضه شده اند بهترین گزینه استفاده از این نوع موتور ها می باشد . چرا که یک مجموعه مطمئن است . بی صدا و حجم کمی را اشغال می کنند و معمولا جریان کشی مناسبی دارند و تنها مشکل آن ها قیمت بالای آن ها است . نکته 1 : دقت کنید موتور های معمولی را مستقیماً به چرخ وصل نکنید زیرا آن ها دارای سرعت بالا ( 2000 تا 3000 ) دور در دقیقه ولی قدرت لازم برای ...
ساخت روبات جنگجو

ربات های جنگجو یکی از جذاب ترین انواع ربات ها است که به علت عدم نیاز به دانش و آگاهی زیاد و با تکیه بر خلاقیت های بدیع، طرفداران زیادی دارد. اصول کلی طراحی این ربات ها بر اساس قوانین مسابقات و با تکیه بر خلاقیت هایی است که عموماً شامل طراحی مکانیکی آن می شود. و هرچه مکانیک ربات دقیق تر مورد بررسی قرار گرفته شده باشد، شانس برتری بیشتری نسبت به دیگر رقبا دارد. در این بین برای دوست داران اینگونه ربات ها، خواندن کتابی که حاوی نکات جالب و منتقل کننده تجربیات ناب باشد، بسیار ضروری به نظر می رسد. چرا که برای پیش برد ایده های ذهنی خود نیاز به ابزاری دارید که شناسایی این ابزار و راهنمایی های انجام گرفته، شما را بیش از پیش به اهدافتان نزدیک تر می کند. نوصیه ما به دوستان عزیزمان این است برای تحقق ایده های ذهنی خود، تا می توانید از مسیر علمی و با نظم از پیش طراحی شده، پیش بروید. کتاب زیر به نام Build your Own combat robot از انتشارات McGraw-Hill به چاپ رسیده و در عین حال آنکه کمی قدیمی به نظر می آید، اما از بهترین مراجع ربات های جنگجو است و حاوی نکات فراوان در طراحی و ساخت اینگونه ربات ها می باشد. دانلود فایل لینک دانلود نرم افزار شبیه سازی ربات جنگجو
كتابهاي آموزشي ساخت ربات

دانلود کتاب آموزش ساخت ربات ساده نام کتاب : آموزش ساخت ربات ساده نویسنده : احمد رستمی ناشر : پارس بوک زبان کتاب : پارسی تعداد صفحه : 36 قالب کتاب : PDF حجم فایل : 650 Kb توضیحات : هر ریات از سه بخش مکانیک ، الکترونیک و کامپیوتر تشکیل شده است. ساده ترین ربات ، رباتی است که بتواند مسیری را که برنامه نویس در برنامه مشخص کرده بپیماید. ربات پیشرفته تر ، خودش تشخیص مسیر داده و بالطبع برنامه آن پیچیده تر و مدارات و قطعات الکترونیکی و مکانیکی آن گسترده تر خواهند شد. ادامه مطلب و دانلود این کتاب دانلود کتاب مکاترونیک و رباتیک نام کتاب : مکاترونیک و رباتیک نویسنده : مرتضی هومان فرد، محمد جواد فتوحی ناشر : پارس بوک زبان کتاب: پارسی تعداد صفحه : 110 قالب کتاب : PDF حجم فایل : 5,164 Kb توضیحات : کتابی فوق العاده کاملی که برای شما آماده شده است یکی از ناب ترین و کمیاب ترین کتاب های آموزش ساخت ربات است که توسط جناب آقای فتوحی و هومان فرد آماده شده است . این کتاب از اولین قدم های ساخت ربات تا خیلی از نکات عملی و نرم افزار های مورد نیاز از جمله کدویژن را بصورت تخصصی آموزش داده است . کل کتاب در ۱۱۰ صفحه تایپ شده به همراه عکس های بسیار واضح می باشد . این کتاب در خیلی از آموزشگاه ها تدریس می شود . کتاب مکاترونیک و رباتیک از چهار بخش کلی تشکیل شده است : - آشنایی با مسابقات رباتیک :ربات های جنگجو ، فوتبالیست ، مین یاب ، تعقیب خط ، میکروماوس - مکانیک ربات :موتور های DC ،منابع تغذیه ، موتور های پله ای ، انواع چرخ ها - الکترونیک ربات :منابع جریان ، مقاوت ها ، خازن ها ، سوئیچ ها ، دیود ،ترانزیستور ، سنسور ها ، آپ امپ - برنامه نویسی ربات :میکرو کنترلر ها ، برنامه نویسی با کدویژن ، مثال های متعدد زبان C ادامه مطلب و دانلود این کتاب دانلود کتاب آموزش طراحی الکترونیکی یک روبات مسیریاب نام کتاب : طراحی الکترونیکی یک روبات مسیریاب نویسنده : رامین عالمیان ناشر : پارس بوک زبان کتاب : فارسی تعداد صفحه : ۴۱ قالب کتاب : PDF حجم فایل : ۷۶۹ Kb توضیحات : در اینجا ما شما را با انواع ربات ها از قبیل ساده و پیچیده و ربات هایی که دارای حسگر هستند آشنا می کنیم و خواهیم گفت که ربات ها توسط ریزپردازشگرها و ریزکنترل گرها کنترل می شوند. همچنین ویژگی های ربات مسیر یاب و نحوه پیاده سازی نرم افزاری و سخت افزاری این ربات را مورد بررسی قرار داده ایم. ادامه مطلب و دانلود این کتاب دانلود ...
ساختن رباط
مراحل ساخت ربات به زبان سادهفرصتي پيش آمد تا همانطور كه گفته بودم مراحل ساخت ربات را برايتان شرح دهم .(البته به طور خيلي خلاصه)فرض كنيم ميخواهيم ربات بسازيم، اين ربات قرار است براي ما كاري انجام دهد. اين كار به عنوان صورت مسئله براي ما مطرح ميشود، اين مسئله در مسابقات همان قوانيني است كه از طرف برگزار كنندگان وضع ميشود . تمام رباتهاي واقعي حداقل از سه قسمت تشكيل شده اند .1- دريافت اطلاعات ( سنسورها)2- پردازش اطلاعات (كامپيوتر،ميكروكنترلر، ترانزيستورها ، رله ها و ... )3- عمل كننده (قسمتهاي مكانيكي)فرض كنيم بخواهيم يك ربات تعقيب خط ساده بسازيم .بر اساس قوانين تعقيب خط نياز به سنسور نوري داريم تا تغيير رنگ را بر اساس تغيير انعكاس نور تشخيص دهد(مدار آن را در مطالب قبل ميتوانيد ببينيد) حال بايست قسمت مكانيكي را طراحي كنيم . با توجه به قوانين بايست طرح مكانيكي ما قابليت چرخش به چپ و راست را داشته باشد . مثلا از سيستم چرخش تانكي و يا فرمان دار سه يا چهار چرخ استفاده ميكنيم ====>>>> سيستم چرخش تانكي به اين صورت است كه موتور محرك چرخهاي چپ و راست جداست . هنگامي كه موتور راست خاموش شود ربات به راست و هنگامي كه موتور چپ خاموش شود ربات به چپ خواهد چرخيد.(بهتر است براي ساخت چنين رباتي از قطعات اسباب بازي استفاده كرد )هنگامي كه قسمت مكانيكي را ساختيم بايد مسيري مطابق با قوانين بسازيم، ربات را به صورت دستي كنترل كنيم و از صحت كار مكانيك مطمئن شويم ، همچنين بر اساس چگونگي حركت ربات نيازهاي آن (تعداد و چگونگي قرار گرفتن سنسورها ، فلوچارت پردازشگر ) مشخص شود .مرحله بعدي نصب سنسورها و ساخت پردازشگر است . توضيح اينكه پردازشگر لزوما كامپيوتر يا ميكرو كنترلر نيست و چنانچه كار ربات ساده باشد فقط از ترانزيستور يا گيتهاي منطقي هم ميتوان استفاده كرد (نمونه يك پردازشگر ربات تعقيب خط با استفاده از گيتهاي منطقي اين پردازشگر وظيفه دارد تا ارتباط بين سنسورها و موتورها را به طور مطلوب فراهم كند. با نصب پردازشگر بر روي ربات كار ساخت ربات به پايان ميرسد و فقط تست و تنظيمات نهايي مانده است
مدار الکترونیکی روبات نوریاب یا بولینگر ساده با دوترانزیستور
مدار الکترونیکی روبات نوریاب یا بولینگر ساده با دوترانزیستور برای ساخت ربات بولینگر ابتدا شما به یک سازه مکانیکی به همراه موتور و گریبکس نیاز دارید. پس از آن باید بخش الکترونیکی را به گونه ای بسازید که روبات بتواند در محیط به دنبال منبع نور بگردد و هوشمندانه به سمت آن حرکت کند. اصولاً روباتهای هوشمند نیاز به حسگرهایی دارند که اطلاعات مورد نظر را از محیط دریافت کرده و در قالب جریان الکتریکی وارد مدا کند. همانگونه که مشخص است ربات نوریاب باید اطلاعات مربوط به شدت نور اطراف خود را دریافت نماید که این کار توسط یک فتوسل انجام می شود. فتوسل یا حسگر نور در واقع یک مقاومت متغیر است که مقدار آن با توجه به نور محیط تغییر می یابد. در صورتی که نور محیط را افزایش دهید مقاومت فتوسل کاهش یافته و جریان بیشتری از آن عبور می کند. همین تغییر جریان است که با توجه به الگوریتم تصمیم گیری ربات شما را هدایت می کند. در مقاله سعی شده است که ساده ترین مدار ممکن که در عین حال به خوبی هم کار می کند تشریح شود. به همین دلیل ممکن در برخی از موارد اصول حرفه ای طراحی مدار رعایت نشده باشد. دوباره متذکر می شویم که این مدار در عین سادگی بسیار کارآمد است و توسط تعداد زیادی از تیم های رباتیک در مسابقات دانش آموزی استان اصفهان ساخته و آزمایش شده است. الگوریتم کاری این ربات نوریاب به این صورت است که ربات در ابتدای کار شروع به گردش در جای خود می نماید . (برای این کار کافی است که یکی از موتورهای آن روشن و دیگری خاموش باشد) این گردش آنقدر ادامه می یابد تا جلوی ربات به سمت منبع نور قرار گیرد. دی این لحظه ربات به حرکت گردشی خود پایان داده و به سمت منبع نور حرکت می کند. (این کار با روشن کردن هر دو موتور ربات اتفاق می افتد) در صورتی که در بین راه به هر دلیل راستای حرکت ربات و منبع نور تغییر نمود ، روبات مجدداً حرکت گردش خود را آغاز می نماید تا دوباره به سمت منبع نور قرار گیرد. اگر در کار روبات کمی دقت کنید متوجه می شوید که یکی از موتورها همواره روشن و کنترل ربات از طریق خاموش و روشن کردن موتور دیگر انجام می شود. پس موتوری که همیشه روشن است به صورت مستقیم به منبع تغذیه متصل می نماییم. مدار تغذیه موتور دوم نیز دارای یک فتوسل است ، هنگامی که فتوسل به سمت منبع نور قرار گیرد مدار تحریک شده و موتور روشن می شود. در این مدار از دو ترانزیستور استفاده شده است که وظیفه تقویت جریان عبوری از فتوسل را به عهده دارند. به دلیل اینکه جریان موتور از ترانزیستور دوم عبور می کند لازم است ترانزیستور T2 از نوعی انتخاب شود که قابلیت جریان دهی خوبی داشته باشد. ترانزیستور پیشنهادی ...