ربات پیازی
رباط های مچ پا (Ankle ligaments)
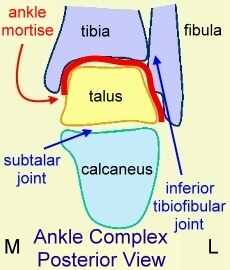
رباط های مچ پا مجموعه مچ پا (Ankle complex) از مفاصل زیر تشکیل می گردد: *مفصل تیبیوفیبولار تحتانی (مفصل درشت نئی-نازک نئی تحتانی) که یک مفصل لیفی (ثابت) بوده و تحرک چندانی ندارد. *مفصل تالوکرورال یا مفصل مچ پا (Ankle joint or Talocrural joint) که حرکت اصلی این مفصل دورسی فلکشن و پلانتار فلکشن است. سه استخوان تیبیا (درشت نی)، فیبولا (نازک نی) و تالوس (قاپ)، مفصل مچ پا را به وجود می آورند (آنکل مورتیس). *مفصل ساب تالار یا مفصل زیرقاپی (مفصل تالوکالکانئال) که بخشی از مجموعه پا (Foot complex) نیز می باشد. حرکت کف پا به طرف داخل (اینورژن) و خارج (اورژن) بیشتر در مفصل ساب تالار صورت می گیرد. تصویر زیر: رباط های مفصل تیبیوفیبولار رباط های مفصل تیبیوفیبولار عبارتنداز: *رباط تیبیوفیبولار جلویی (قدامی) تحتانی (رباط درشت نئی-نازک نئی جلویی تحتانی) *رباط تیبیوفیبولار پشتی (خلفی) تحتانی (رباط درشت نئی-نازک نئی پشتی تحتانی) رباط های مفصل مچ پا (مفصل تالوکرورال) رباط های مفصل مچ پا شامل رباط های طرفی داخلی (دلتویید) یا MCL و رباط های طرفی خارجی یا LCL است. رباط دلتویید (رباط های طرفی داخلی) این رباط که از قوزک داخلی مبدا می گیرد، قوی تر از رباط های طرفی خارجی بوده و شامل فیبرهای سطحی و عمقی است. فیبرهای سطحی رباط دلتویید خود شامل رباط های زیر است: *رباط تیبیوناویکولار یا رباط درشت نئی-ناوی (فیبرهای جلویی یا قدامی) *رباط تیبیوکالکانئال یا رباط درشت نئی-پاشنه ای (فیبرهای میانی) *رباط تیبیوتالار پشتی یا رباط درشت نئی-قاپی پشتی (فیبرهای پشتی یا خلفی) تصویر زیر: فیبرهای عمقی رباط دلتویید، رباط تیبیوتالار جلویی (رباط درشت نئی-قاپی جلویی) نام دارد. رباط های طرفی خارجی (LCL) این رباط ها که از قوزک خارجی مبدا می گیرند شامل رباط های زیر هستند: *رباط تالوفیبولار جلویی (رباط قاپی-نازک نئی جلویی) *رباط تالوفیبولار پشتی (رباط قاپی-نازک نئی پشتی) *رباط کالکانئوفیبولار (رباط پاشنه ای-نازک نئی) تصویر زیر: رباط های مفصل ساب تالار (مفصل تالوکالکانئال) رباط های مفصل ساب تالار عبارتنداز: *رباط تالوکالکانئال داخلی (رباط قاپی-پاشنه ای داخلی) *رباط تالوکالکانئال خارجی (رباط قاپی-پاشنه ای خارجی) *رباط تالوکالکانئال بین استخوانی (رباط قاپی-پاشنه ای بین استخوانی) *رباط سرویکال (رباط گردنی) تهیه و تنظیم: فیزیوتراپیست ابراهیم برزکار منبع تصویر: http://www.pt.ntu.edu.tw http://www.hawaii.edu/ مطالب مرتبط: مفصل چیست مچ پا (Ankle) پا (Foot) عضلات مچ پا (Ankle muscles) استخوان های تارسوس (Tarsal bones) مفصل ثابت (Fixed joint) مفاصل غضروفی (Cartilaginous joints) مفاصل سینویال ( Synovial joints) کپسول مفصلی (Articular capsule) دستگاه اسکلتی (Skeletal system) *استفاده ...
کوادکوپتر یا ربات پرنده
کوادکوپتر (quad copter) تقریبا از لحاظ تعریف ظاهر مثل هلی کوپتر هست . با این تفاوت که از نامش پیداست 4 موتوره هست . البته نمونه های 3 موتوره و 8 موتوره و حتی 16 موتوره هم هست . راستش هزینه ساخت این ربات جذاب و پرکاربرد بالاست . یه چیز معمولی، تقریبا 1.3 میلیون تومان در میاد . (با قیمت دلار 3000 تومنی ) . سعی میکنم هر قطعه ای که معرفی میکنم قیمت حدودی رو اعلام کنم که متوجه هزینه بالای این ربات جذاب بشید.کوادکوپتر رباتی هست که هرروز داره پیشرفت می کنه. با اضافه کردن یک ماژول به این ربات، میشه استفاده های بیشتری از کواد کرد. واسه ساخت کواد کوپتر باید یه سری قطعات تهیه کنیم. باتری و سنسورهای مخصوص خودشو داره که به وقتش توضیح میدم..مهمترین و اصلی ترین قطعه ، موتور هست. چندین موتور در بازار وجود داره (موتور ac، موتور dc، موتور سِروُ، استپ موتور و ..) همه این موتورها بوسیله جاروبک (براش - brush) تغذیه می شوند. ولی واسه ساخت کوادکوپتر از این موتورها استفاده نمی کنیم. (حتی اگر سرعت بالایی داشته باشند) علتش اینه که به علت وجود جاروبک در ساختار موتور، جریان مصرفیشون زیاد میشه. و برای ما که میخواهیم با باتری استفاده کنیم، منطقی نیست.به همین منظور موتورهایی هستند که تنها استفادشون فقط برای ساخت همین هواپیماها و هلی کوپترهای مدلینگ هست. در ساختار این موتورها از جاروبک استفاده نشده و به همین منظور به اونها موتور های براشلِس (brush less) گفته میشه. موتورهای براشلس سرعت بسیار زیادی دارند و در عوض قدرت کمتر..واسه ساخت کوادکوپتر معمولا از موتور 12 ولت استفاده می کنند. دقیقا 12 هم نیست. 11.2 ولته. پس واسه ساخت یه کواد کوپتر نیاز به 4 تا موتور براشلس داریم. قیمت هر موتور تقریبا 80 تا 90 هزار تومانه.تا اینجای بحثو داشته باشید تا بعدا در مورد راه اندازی موتورها صحبت کنمیه چیز دیگه اینکه مهترین دلیل محبوبیت کوادکوپترها اینه که نسبت به هلی کوپتر استیبل (پایدار) تره. و همین استیبل بودنشه که معمولا برای اون دوربین نصب می کنن. از این وسیله معمولا برای فیلم برداری از مناطقی که دسترسی نداره استفاده میشه.بد نیست جدیدترین امکاناتی که برای کوادکوپتر در نظر گرفتن رو همین جا بگم. اول اینکه دما سنج، رطوبت سنج و ارسال مستقیم تصویر به کاربر و ... به کنار. کوادکوپتر های جدید مجهز به سیستم GPS هستن. شما میتونید به کواد دستور بدید که بر روی فلان مختصات قرار بگیره. خب اینم چیز جذابی نیست. اما من نمونه جذاب تری دیدم. اینکه سازنده کوادکوپتر یک ماژول GPSرو بر روی خودش نصب کرده بود. (گذاشته بود توی جیبش) و هرجا میرفت، کواد هم مثل حیوان خانگیش اونو دنبال می کرد! بالای سر اون شخص ...
آسیب رباط صلیبی(متقاطع) قدامی یا ACL
مقدمه: درد زانو و آسیبهای ورزشی زانو در ورزشکاران شایع است .زانو بعد از مچ پا شایع ترین محل صدمات ورزشی است.صدمات رباط صلیبی قدامی یکی ازعلل شایع زانودرد حاد و مزمن است.جراحات این رباط مهم زانو عمدتاً ناشی از کاهش ناگهانی سرعت در هنگام دویدن و صدمات ورزشی تماسی که جزء چرخشی روی زانو دارند می باشد. همچنین ورزشهای تماسی می توانند ثانویه به کشیده شدن زانو, اعمال نیروهایی از سمت خارج به داخل زانو و یا باز شدن بیش از اندازه زانو (Hyper extension ) سبب صدمه دیدگی رباط صلیبی قدامی ( ACL ) شوند.صدمه دیدگی رباط ACL در سطح یکسانی از فعالیت در زنان بیشتر رخ می دهد و درصد قابل ملاحظه ای از صدمات زانو را تشکیل میدهد. حداقل 50% از افراد با آسیب ACL دچار آسیب همراه در منیسک زانو می شوند که منیسک خارجی مستعدتر به آسیب دیدگی است ( البته در آسیب دیدگی حاد ). در آسیب های مزمن رباط ACL معمولاً منیسک داخلی است که دچار آسیب همراه می شود. سالانه در آمریکا 95000 پارگی رباط ACL گزارش می شود.رباط صلیبی قدامی زانو ( ACL ) برای پایداری مفصل زانو در هنگام دویدن, پرتاب پا و ... بسیار حیاتی است. زانویی با آسیب دیدگی رباط ACL بسیار برای صدمه دیدگی در منیسک و تغییرات تخریبی ( آرتروز ) مستعد است. فرکانس: در آمریکا سالیانه 200000 آسیب مرتبط با ACL ایجاد می گردد که 95000 مورد آن پارگی رباط صلیبی قدامی است. همچنین سالیانه حدود 100000 بازسازی رباط توسط جراحی انجام می شود.بروز آسیب به این رباط در ورزشهایی مثل فوتبال, بسکتبال و اسکی بیشتر است.همچنین احتمال ایجاد این آسیب در زنان 7/9- 5/2 برابر مردان است ( در سطح یکسانی از فعالیت ) آناتومی کاربردی:رباط صلیبی قدامی در عقب به لبه خلفی داخلی کوندیل خارجی ران اتصال دارد سپس در داخل کپسول مفصل ران به سمت پائین, جلو و داخل رفته کمی پهن تر شده و به حفره ای در جلو و خارج استخوان درشت نی اتصال می یابد. این رباط دو باند دارد. باند جلویی داخلی که در هنگام خم شدن زانو کشیده و در هنگام باز شدن زانو شل است و باند خلفی خارجی که در هنگام باز شدن زانو کشیده و در هنگام خم شدگی زانو شل است.رباط ACL از شاخه خلفی عصب مربوط به درشت نی عصب می گیرد و سبب ایجاد حس عمقی در زانو می شود. بیومکانیک ورزشی:85% از مقاومت در مقابل حرکت به جلوی استخوان درشت نی نسبت به استخوان ران را در محل مفصل زانو, ACL تامین می کند و سبب پایداری زانو در هنگام ایست ناگهانی می شود. حداکثر مقاومت ACL زمانی است که زانو در حالت کاملاً باز قرار دارد.همچنین رباط صلیبی قدامی در محدود کردن میزان چرخش درشت نی هم نقش دارد و هنگامی که زانو کاملاً باز است در مقابل نیروهای وارد به زانو از داخل و خارج ...
مکاترونیک چیست ؟
مکاترونیک فصل مشترک علوم مکانیک ، الکترونیک و محاسبات کامپیوتری می باشد که از ترکیب این دانش ها پدید آمده است. این مهندسی موجب می شود تا بتوانیم سیستم هایی ساده تر و با قابلیت اطمینان بیشتر طراحی کنیم. سیستم هایی که در عین سادگی و اقتصادی بودن ، بسیار دقیق و هوشمند عمل نمایند و به نحوی خود را با شرایط محیطی وفق دهند.واژه مکاترونیک برای اولین بار در سال ۱۹۶۹ و توسط آقای تتسورو موری (Tetsuro Mori) مهندس ارشد شرکت یاسکاوا (YASKAWA) ژاپن مطرح شد.امروزه ماژولهای مکاترونیکی بسیاری در صنایع مختلف وجود دارد که به کمک آنها بسیاری از کارهای پیچیده ساده شده است. برای مثال سیستم ضد قفل یک خودرو را می توان یک ماژول مکاترونیکی دانست. چراکه برای طراحی آن چندین دانش مختلف نیاز است و تیم طراح بایستی از کلیه علوم ذکر شده اطلاعات کافی داشته باشند. سایر کاربرد ها را می توان در پالایشگاه ها ، صنایع فولاد ،صنایع سیمان ، رباتیک ، مهندسی پزشکی و ... جستجو کرد.شاخه ای تخصصی از مکاترونیک نیز امروزه وجود دارد که در زمینه نانو تکنولوژی فعالیت و تحقیق می کند.تحصیل در زمینه رشته مکاترونیک مستلزم گذراندن دروس مختلفی از قبیل ریاضیات مهندسی پیشرفته, تئوری کنترل و کنترل دیجیتال, مدارات الکترونیکی, رباتیک , هوش مصنوعی , دینامیک و استاتیک , پردازش سیگنال , میکرو کنترلر ها , پردازش تصاویر و بینایی ماشین و انتقال داد ها می باشد.دانشگاه های مختلفی در سراسر دنیا به این رشته از مهندسی می پردازند و پیشرفتهای فراوانی همه روزه حاصل می شود.در ایران نیز اولین دانشگاهی که این رشته را تاسیس کرد , دانشگاه آزاد اسلامی قزوین بود که این امر به همت آقای دکتر علیرضا محمد شهری و ریاست دانشگاه آقای دکتر مرتضی موسی خانی صورت گرفت. ایشان دارای دکتری مهندسی مکاترونیک از (دانشگاه ولونگنگ) استرالیا می باشند و در حال حاضر عضو هیئت علمی دانشگاه علم و صنعت ایران هستند.این دانشگاه هم اکنون فارغ التحصیلان زیادی در مقطع کارشناسی ارشد داشته است. اولین سال جذب این رشته در دانشگاه قزوین سال 1382 بوده است.علاوه بر دانشگاه قزوین ، دانشگاه های مطرح و فعال در ایران در این زمینه عبارتند از :دانشگاه خواجه نصیر ، دانشگاه علم و صنعت، دانشگاه صنعتی شریف، دانشگاه سمنان ، دانشگاه تبریز و دانشگاه آزاد واحد علوم و تحقیقات تهران.به کشورهایی که در حال حاضر سرمایه گذاری وسیعی در این رشته داشته اند می توان بهآمریکا ، ژاپن ، استرالیا ، اتریش ، آلمان ، بلژیک و روسیه اشاره کرد.
رباط صلیبی قدامی(Anterior cruciate ligament)
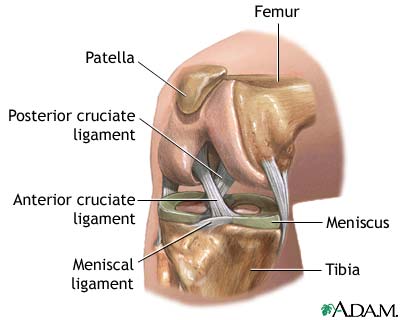
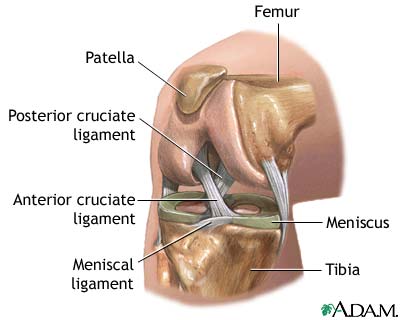
صفحه رباط متقاطع جلویی(ACL)که در سایت ویکی پدیا ایجاد کردم:رباط متقاطع جلویی (به انگلیسی: Anterior cruciate ligament) یکی از رباطهای مهم مفصل زانو است.ازجمله عوامل مهم ثبات هر مفصل بستگی به سالم بودن ساختمان رباط آن مفصل دارد و اگر مفصلی تحرک زیادی در حالت طبیعی داشته باشد،نقش رباط یا رباطهای آن مفصل اهمیت بیشتری مییابد.قدرت رباط متقاطع جلویی معادل رباط طرفی داخلی[۱] یا MCL و نصف قدرت رباط متقاطع پشتی[۲](PCL) است[۳].رباط متقاطع جلویی معمولا رباط صلیبی جلویی (قدامی) نیز خواندهمیشود. این رباط ازجمله رباطهایی است که به هنگام فعالیتهای شدید آسیب میبیند.در ورزشکاران حرفهای پارگی رباط متقاطع جلویی شایع است و به پارگی ACL معروف است.اگر نیروی اعمال شده خیلی زیاد باشد،احتمال پارگی رباط طرفی داخلی و منیسک داخلی به همراه پارگی رباط متقاطع جلویی وجود دارد.فهرست مندرجات [نهفتن]۱ نقش و عملکرد ۲ درجات آسیب ۳ شایعترین علل آسیب ۴ تشخیص ۵ درمان ۵.۱ درمان آسیب درجه ۱ ۵.۲ درمان آسیب درجه ۲ ۵.۳ درمان آسیب درجه ۳ ۶ پانویس ۷ منابع ۸ نگارخانه نقش و عملکرد چهار رباط اصلی مفصل زانو عبارتنداز:-رباط طرفی داخلی(MCL) یا رباط طرفی درشت نی[۴] -رباط طرفی خارجی(LCL) یا رباط طرفی نازک نی[۵] -رباط متقاطع جلویی(ACL) یا رباط صلیبی قدامی -رباط متقاطع پشتی(PCL) یا رباط صلیبی خلفی تصویر ذیل: رباط های طرفی(کولترال) زانو بیشتر در ایجاد ثبات جانبی مفصل نقش دارند.رباط های متقاطع(صلیبی)داخل کپسولی هستند که بیشتر باعث افزایش پایداری مفصل در سمت جلو و عقب می گردند.مهمترین وظیفه رباط متقاطع جلویی،محدود کردن حرکت استخوان درشت نی به جلو و چرخش داخلی آن در عمل صاف کردن زانو است.این رباط همچنین در یک زنجیره حرکتی بسته[۶] از حرکت استخوان ران به سمت عقب روی درشت نی ثابت جلوگیری می کند. درجات آسیب به طورکلی شدت و درجات آسیب رباط صلیبی جلویی(قدامی)شامل:-درجه ۱:پارگی خفیف است.ناپایداری وجود ندارد و میزان خونریزی پایین است. -درجه۲:خونریزی وجود دارد و پارگی ناقص است.به دلیل پارگی ناقص تاحدودی بی ثباتی وجود دارد. -درجه ۳:از هم گسیختگی فیبرها کامل است(پارگی کامل).خونریزی در مفصل وجود دارد و بی ثباتی ایجاد میشود. تصویر زیر در پارگی کامل رباط متقاطع جلویی به ویژه در ورزشکاران حرفهای یک صدای پوپ ازطرف بیمار گزارش میشود.ابن صدا ی پوپ با احساسی از خالی نمودن زانو ایجاد میگردد.در لحظه پاره شدن درد شدید است اما پس از آن کاهش مییابد. چون خونریزی در مفصل (همارتروز) بعدا اتفاق میافتد درد ثانویه ناشی از آن وجود خواهد داشت.اما درصورت پارگی ناقص به علت وجود درد شدید، امکان ...
سفیدک دروغی (داخلی) پیاز
سفیدک دروغی (داخلی) پیاز عامل بیماری: (Berk.) Caspary Pernospora destructor (قارچ آبدوست و غیر حقیقی) بیماری بصورت سیستمیک در گیاه گسترش می یابد به طوریکه 3 تا 4 نسل آن به طور کامل محصول را از بین می برد. بیماری تنها به پیاز و پیازچه و تا حدی سیر خسارت وارد می کند. قارچ عامل بیماری در بقایای سوخ و اندام های رویشی گیاهان آلوده پیازی زمستان گذرانی می کند. همچنین به صورت اووسپور در خاک می تواند بقا داشته باشد. علائم بیماری: علائم اولیه بصورت سفید مایل به خاکستری تا ارغوانی مایل به قهوه ای شدن سطح برگ های مسن بروز می یابد. با پیشرفت بیماری برگ های جوان در ابتدا سبز رنگ پریده، سپس زرد و درنهایت خشک می شود. در شرایط آلودگی شدید اسپور و اسپورانژیوم های قارچ عامل بیماری در سطح برگ و ساقه های گل دهنده ظاهر می شود. شرایط بهینه برای اسپورزایی قارچ و آلودگی دمای روزانه زیر 24 درجه دمای شب 4 تا 24 درجه رطوبت نسبی بالای 95 درصد در شب آزاد سازی اسپورها در صبح انجام می شود (اسپورها بعد از رها سازی 1تا 3 روز بقا خواهند داشت) اسپورها در هوا و به ویژه توسط آب (قطرات باران) گسترش می یابند. وقتی برگ ها مرطوب هستند زمینه ایجاد آلودگی کاملا فراهم می شود (در مدت 3 تا 6 ساعت در دامنه دمایی 4 تا 26 درجه) مدیریت بیماری: تناوب زراعی و حذف بقایای گیاهی آلوده از سطح مزرعه مبارزه شیمیایی با قارچ کش های ثبت شده مثل مانکوزب، مانب، متالاکسیل مانکوزب، رانمن (سیازوفامید) کابیرو(پیراکلواستروبین)، کوادریس (آزوکسی استروبین)، پریستین (پیراکلواستروبین+ بوسکالید)، آکروبات (دیمتومورف)، سرناد (با ماده موثره Bacillus subtilis) و ترکیبات مسی "کلروتالونیل" و" ایپرودیون" بیماری سفیدک داخلی پیاز را کنترل نمی کنند، ولی اگر مانب و یا مانکوزب با کلروتالونیل مخلوط شوند سفیدک داخلی و همچنین بلایت برگی ناشی از بوتریتیس در پیاز همزمان کنترل می شوند.