ربات کوادروتور
آموزش ساخت ربات پرنده (کوادروتور)

بحث ربات های پرنده چند سالی است که به شدت مورد علاقه ی بسیاری از علاقه مندان به رباتیک و هوافضا قرار گرفته است. شاید دلیل این امر جذاب بودن ساختار و همچنین مأموریت های خاصی است که فقط از عهده ربات های پرنده بر می آید. به همبن دلیل برآن شدیم که جهت پاسخگویی به نیاز جمع کثیر دوستان علاقه مند به این ربات ها، سلسله آموزش های گام به گام جهت آشنایی و ساخت کوادروتور بر پایه تجربیات پیشین را در اختیار دوستان قرار دهیم.در این پست به آشنایی مقدماتی با ساختار کوادروتورها و برخی اصلاحات بکار رفته در ساخت این پروژه پرداخته شده است و انشاا… در پست های بعدی مطالب به صورت جزء و تخصصی تر ارائه خواهد شد.لطفاً با ارائه ی نظریات خود ما را در هرچه بهتر ساختن مطالب یاری فرمایید.دانلود PDF به زبان فارسی و همچنین تماشای آموزش های تصویری در ادامه مطلب. دانلود PDFلینک تماشای فیلم آموزشیجهت دانلود فیلم ها از سایت آپارات از آخرین ورژن نرم افزار (IDM(Internet Download Manager استفاده نمایید.
ساخت کوادروتور (ساخت بدنه)سعید خیرخواه

در ادامه سلسله آموزش های ساخت کوادروتور در این قسمت(قسمت چهارم) می خواهیم نکات مربوط به ساخت بدنه را بیان کنیم. در این قسمت سعی شده قطعات مورد استفاده در ساخت بدنه ربات پرنده( کوادروتور) را معرفی کرده و همچنین ویزگی،مزایا و معایب آن تشریح کنیم. قسمتی از بدنه کوادروتور مطالب پوشش داده شده: گشتاور چیست؟ فرق گشتاور پیچشی و خمشی(تُرک و ممان)جسم صلب چیست؟ویزگی های آلومینیوم،پلسکی،میله های کربنی و… چیست؟فرق کوادروتور(پلاس) با X Quadrotor چیست؟بدنه خود را بر اساس چه معیارهایی طراحی کنیم و …… لطفاً جهت دانلود فایل PDF ( به زبان فارسی )به ادامه مطلب مراجعه فرمایید. لینک دانلود فایل PDF
فروش کوادروتور
کوادروتور در ابعاد کوچک و بزرگ دارای مانت دوربین و ارسال تصویر همزمان و جی پی اس . ساخته شده از مرغوبترین اجناس. از 2 ملیون تومان تا 20 میلیون تومانخرید
ساخت کوادروتور (راه اندازی موتور)
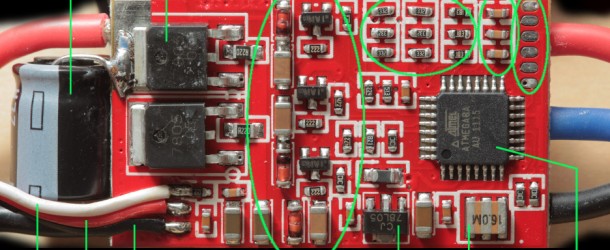
ساخت کوادروتور (راه اندازی موتور) از سلسله آموزش های ساخت ربات پرنده (کوادروتور)، در این قسمت (قسمت سوم) سعی داریم درایورهای موتور براشلس را معرفی کرده و انواع آن را توضیح دهیم. همچنین سعی شده تئوری های به کار رفته در ساخت آنها را در حد توان به زبانی ساده بیان کنیم. Brush Less DC Electronic Speed Controller Sensor less در این قسمت توضیحاتی تکمیلی در ارتباط با کنترل کننده سرعت موتورهای براشلس ( BLDC ESC) و توضیح روش Sensor less Driver و محاسبات آن پرداخته شده (که اکثر موتورهای رایج در بازار از نوع بدون سنسور هستند) و همچنین ملاک های انتخاب اسپیدکنترلرها بررسی شده است. ضمن تشکر از دوستانی که در فرم های نظر خواهی سایت که در پایین صفحه قرار دارد شرکت نموده اند، لذا از بقیه دوستان تقاضا مندیم با انتخاب محدوده سنی خود، ما را در هرچه بهتر ساختن مطالب سایت یاری فرمایید.(با استفاده از نتایج نظرسنجی، آگاهی ما از طیف اکثریت مخاطبان بیشتر شده و مطالب هدفمند تر و منطبق با سلایق شما عزیزان ارائه خواهد شد)لطفاً به عنوان پیش نیاز، قسمت دوم و همچنین قسمت آشنایی با موتور براشلس را مطالعه فرمایید. لینک دانلود فایل
آموزش ساخت ربات پرنده (کوادروتور)

آموزش ساخت ربات پرنده (کوادروتور) بحث ربات های پرنده چند سالی است که به شدت مورد علاقه ی بسیاری از علاقه مندان به رباتیک و هوافضا قرار گرفته است. شاید دلیل این امر جذاب بودن ساختار و همچنین مأموریت های خاصی است که فقط از عهده ربات های پرنده بر می آید. به همبن دلیل برآن شدیم که جهت پاسخگویی به نیاز جمع کثیر دوستان علاقه مند به این ربات ها، سلسله آموزش های گام به گام جهت آشنایی و ساخت کوادروتور بر پایه تجربیات پیشین را در اختیار دوستان قرار دهیم. در این پست به آشنایی مقدماتی با ساختار کوادروتورها و برخی اصلاحات بکار رفته در ساخت این پروژه پرداخته شده است و انشاا… در پست های بعدی مطالب به صورت جزء و تخصصی تر ارائه خواهد شد. لطفاً با ارائه ی نظریات خود ما را در هرچه بهتر ساختن مطالب یاری فرمایید. دانلود PDFلینک تماشای فیلم آموزشیجهت دانلود فیلم ها از سایت آپارات از آخرین ورژن نرم افزار (IDM(Internet Download Manager استفاده نمایید. لینک مشاهده قسمت های بعدی آموزش
ساخت کوادروتور (ساخت بدنه)
ساخت کوادروتور (ساخت بدنه) لینک دانلود
روبات های پرنده
ربات پرنده ( کوادروتور )رباتهای پرنده شاید تمامی پرنده های بی سرنشین رو در بر بگیره اما از نظر خیلی از کارشناسها کوادرتور ها میتوانند به حق این لقب رو یدک بکشند چون ترکیبی از مکانیک پرواز – الکترونیک و کامپیوترند. اما کوادرتور چیست؟؟؟ کوادرتور یا کوادروکوپتر یا پرنده چهار ملخه نوعی عمودپرواز است که بخاطر استفاده از چهار ملخ بصورت صلیبی این لقب را به ان داده اند. این نوع پیکربندی به پرنده این امکان را میدهد تا پرنده بتواند به راحتی و بطور مساوی در تمامی جهات حرکت کند و قدرت مانور فوق العاده ای داشته باشد. اما این پرنده بر خلاف ظاهر ساده خود بسیار بسیار پیچیده است بطوری که طراحی این نوع از پرنده ها در کشورهای محدودی انجام میگیرد و در کشور ما ایران تقریبا فقط تیم MRL از دانشگاه قزوین تونسته تا حدودی به این فناوری دست پیدا کنه . اما مشکل بزرگی که بر سر طراحی همچین پرنده هایی وجود دارد مسئله پایداری این نوع از پرنده هاست که کار بسیار پیچیده ای است . در زیر به برخی از مشکلاتی که ممکن است تعادل پرنده را برهم بزند خواهیم پرداخت تا بیشتر با این مشکلات اشنا بشید. ۱)تغییر دور ناخواسته پره ها و عدم تعادل در سرعت چرخش پره ها: این امر ممکن است بخاطر عوامل زیاد و گوناگونی اتفاق بیفتد ازجمله اصطحکاک متفاوت موتورها بخاطر کثیفی موتورها یا همدور نبودن خود موتورها یا عدم همخوانی استپهای کنترل دور یا مسائلی از این دست۲)عدم تعادل وزنی پرنده: این مسئله که بسیار شایع است ممکن است بخاطر عواملی چون تغییر مرکز ثقل و یا نصب نامتقارن تجهیزات اصلی و یا فرعی مانند دوربینها و سنسورها و یا عوامل خارجی دیگر رخ دهد۳) اما مهمترین مسئله در عدم پایداری باد است: باد به تنهای میتواند تعادل تمامی پرنده ها را برهم بزند و کوادرتور هم جدا از این مسئله نیست.اما بادها جور دیگری هم خودنمایی میکنند و ان تاثیر باد ناشی از خود ملخها که شامل جریان گردابی ملخها و جریان برگشتی از سطح زمین میشود که بصورت نامتعادل به خود پره ها و بدنه پرنده برخورد کرده و بشدت تعادل پرنده را برهم میزند.اما اثر مشکل عدم تعادل به این گونه است که اگر پرنده به هر دلیلی از دلایل فوق ۱درجه و شاید هم کمتر از تعادل خارج شود بردار رانش موتورها از حالت عمود خارج شده و پرنده به صورت ناخواستا به یک سمت حرکت میکند که این امر با ازدیاد زاویه ناپایداری سرعت بیشتری میگیرد به طوری که باعث برخورد ناخواسته و عدم ثابت ایستادن پرنده میشود و در نهایت منجر به سقوط و انهدام پرنده میشود.کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است. یعنی به این صورت ...
همه چیز در مورد ربات های پرنده چهار ملخه(quadrotor robot)
اطلاعات این بسته شامل:عکس های رباتشبیه ساز مکانیک ربات در محیط نرم افزاری کتیاچارت مدارات کوادروتورtdp کوادروتورtdp سنسور های رباتاموزش کار با موتور های براشلس اموزش کار با سنسور های جایروآموزش ساخت کوادروتورDATA SHEETسنسور های جی پی اس و وایرلسو...کسانی که مایل هستند از اطلاعات فوق بهرمند بشن در قسمت نظرات شماره ی خودشونو ثبت کنن و درخواستشنو کتبی بنویسند تا باهاشون تماس بگیریم و براشون ارسال کنیم و یا اگر عجله دارند با شماره تلفن 09356805434تماس بگیرندBE OMID ROZI KE HAR IRANI BETONE YE ROBAT BESAZE
اموزش ساخت کوادروتور با استفاده از برد KK

اموزش ساخت کوادروتور با استفاده از برد KK کوادرتور چیست ؟ کوادرتور یا کوادکوپتر یا پرنده چهار ملخه نوعی عمودپرواز است که بخاطر استفاده از چهار ملخ بصورت صلیبی این لقب را به ان داده اند. این نوع پیکربندی به پرنده این امکان را میدهد تا پرنده بتواند به راحتی و بطور مساوی در تمامی جهات حرکت کند و قدرت مانور فوق العاده ای داشته باشد. در این مقاله اموزش کامل ساخت کوادروتور توضیح داده شده است و از انجایی که ساخت کوادروتور نیاز به هزینه ی تقریبا زیادی دارد ما سیع میکنیم با حداقل هزینه یک کوادروتور بسازیم . این فایل از سه قسمت تشکیل شده است در قسمت اول که با نام اشنایی با قطعات کوادروتور نام گذاری شده است تمام قطعاتی که در کوادروتور به کار میرود معرفی و توضیح داده شده اند , همچنین برای دوستانی که در شهرستان زندگی میکنن و امکان دسترسی به این قطعات را ندارند سایت ها و لینک هایی که میتوانند قطعات را از طریق انها تهیه کننند قرار داده شده است . در قسمت دوم که نام ان اموزش راه اندازی برد KK میباشد , اموزش کامل راه اندازی و کالیبره کردن برد KK به صورت تصویری توضیح داده شده است . با کمک این دومقاله ی کاملا فارسی و تهیه شده توسط سایت الکتروبو شما با تمام قطعات کوادروتور اشنا میشوید و میتوانید با استفاده از برد KK که میتوانید ان را به راحتی تهیه کنید ( از طریق فروشگاه های قطعات الکترونیکی , رباتیک و یا فروشگاه های عمود پرواز و از طریق فروشگاه های اینترنتی که برخی از انها را در مقالات معرفی کردیم ) یه کوادروتور بسیار خوب با هزینه ی پایین بسازید . در قسمت سوم اموزش ساخت بدنه کوادروتور قرار داده شده است که با استفاده از ان میتوانید بدنه کوادروتور تون را خودتون درست کنید . شما میتوانید این مجموعه را با پرداخت مبلغ 3000 تومان دانلود کنید. حجم فایل فشرده : 5.89 MB برای پرداخت توسط پرداخت انلاین بانک ملت و دانلود اینجا کلیک کنید
اموزش ساخت ربات مسیریاب
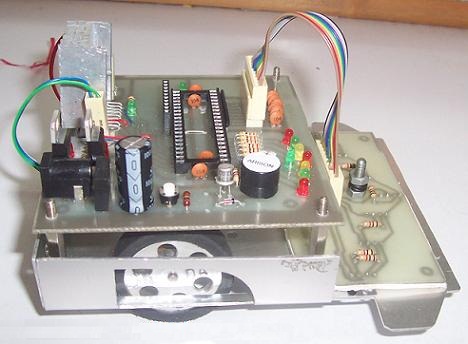
اموزش ساخت ربات مسیریاب 8 سنسور ربات مسیریاب چیست؟ نوعي از ربات است كه وظيفه اصلي آن تعقيب كردن مسيري به رنگ مثلا سياه در زمينهاي به رنگ متفاوت مشخصي مثلا سفيد است. يكي از كاربردهاي عمده اين ربات، حملونقل وسايل و كالاهاي مختلف در كارخانجات، بيمارستانها، فروشگاهها، كتابخانهها و … ميباشد. در این مقاله اموزش ساخت ربات مسیر یاب 8 سنسور اموزش داده میشود. با استفاده از این مقاله حتی کسانی که تجربه ساخت ربات مسیریاب ندارند و اطلاعات زیادی درباره ی ان ندارند میتوانند به راحتی برای خود ربات مسیریاب حرفه ای بسازند . همچنین کسانی که ربات مسیریاب ساخته اند با استفاده از نکاتی که در این مقاله گفته شده است میتوانند عملکرد ربات مسیریاب خود را بهبود بخشند . با استفاده از این مقاله میتوانید با توجه به راهنمایی هایی که برای انتخاب موتور ربات مسیریاب شده است, موتور مناسب را انتخاب کنید . در بخش دیگر توضیحات قسمت الکترونیک ربات مسیریاب قرار داده شده است که شامل برد اصلی ربات و برد سنسورها میشود و مدارات لازم با توضیحات و نکات کامل قرار داده شده است. بخش دیگر در رابطه با برنامه نویسی ربات مسیریاب میباشد که برنامه به زبان c ( کدویژن) با توضیحات کامل قرار داده شده است , در برنامه نویسی سعی شده که از دستورات ساده استفاده شود که کسانی که با برنامه نویسی اشنایی ندارند و یا اینکه به زبان c تسلط ندارند با توجه به توضیحاتی که درباره برنامه قرار داده شده است به راحتی متوجه ان میشوند . همچنین سورس و هگز برنامه و شبیح سازی پروتئوس و تصاویر لازم قرار داده شده است که به راحتی با توجه به توضیحات و فایل های قرار داده شده میتوانید یک ربات مسیریاب حرفه ای بسازید . شما میتوانید این فایل را با پرداخت مبلغ 3500 تومان دانلود کنید. این فایل را میتوانید با تخفیف 20% دانلود کنید . مدت این تخفیف محدود است . قیمت این مجموعه با در نظر گرفتن تخفیف 2800 تومان میباشد . برای پرداخت توسط پرداخت انلاین بانک ملت و دانلود اینجا کلیک کنید