سیستم گلستان مالک اشتر
خطاهای سیستم های اندازه گیری
خطاهای سیستم های اندازه گیری در دستگاه های گوناگون اندازه گیری شکل های متفاوتی از خطا ممکن است که ظاهر شود. در این میان بسیاری از خطاها منحصر به یک دستگاه خاص است و گاهی نیز با صورتی از خطاها روبه رو می شویم که ، این نوع خطاها به صورت مشترک در بسیاری از انواع دستگاه های سنجش و اندازه گیری مشترک می باشد. در ادامه سعی بر آن است که با گونه های متفاوتی از این خطاها که بیشتر رایج است ، آشنا شویم. · از جمله خطاهای بسیار رایج خطای دید است. برای نمونه ، زمانی که از اندازه گیرهایی استفاده می شود که دارای ارائه ی اطلاعات به صورت آنالوگ می باشند ، با این صورت از خطاها روبه رو می شویم. معمولا این خطا در خواندن انواع خط کش ، مشاهده ی عقربه ها و نمودارها می باشد. البته گاهی این ها به دلیل عوامل فیزیکی ای چون شکست نور رخ می دهند. · در اندازه گیرهای مقاومتی رطوبت به دلیل محدودیت بازه ی اندازه گیری ، حدود ابتدایی و انتهایی ، نمی توان رطوبت را به درستی در همه رنج اندازه گرفت. · در اندازه گیری رطوبت از طریق دما ، ممکن است حباب ها کاملا به صورت مطلق خیس و یا خشک نباشند ، به علاوه ممکن است با خطای دید ، به صورت اشتباه در خواندن جداول ، نقشه ها ، خط کش و نمودار سایکومتری روبه رو باشیم. · در روش هیدروگراف استفاده ی مداوم از دستگاه ممکن است سبب شود که موی انسان و یا پوست غورباقه از حالت کالیبره خارج شود و تلرانس های لازم از بین برود. · در مانومترها همواره مشکل انحنای سطح سیال درون لوله وجود دارد ، که این می تواند سبب بروز خطای دید در خواندن ارتفاع ستون سیال گردد.〔3〕 · در هنگام خواندن مانومترها باید به این نکته کاملا دقت کرد ، که مانومتر کاملا تراز قرار گرفته باشد. در صورت تراز نبودن مانومتر ، خطا در ارتفاع نشان داده به وجود خواهد آمد. 〔3〕 · در مقادیر کم فشار نسبی ، به دلیل حد تفکیک کم در مانومترها به ویژه در انواع جیوه ای ، با مشکل خطای دید روبه رو خواهیم بود. · لوله های بوردن در اثر ضربه خوردن دچار خطا می شوند که معمولا این باعث بروز یک خطای سیستماتیک مثل خطای صفر می شود. · کم شدن سیال درون نمایشگرهای عقربه ای (مثل فشارسنج ها)، می تواند باعث لرزیدن عقربه شود. · استرین گیج ها که با تغییرات مقاومتی کرنش سنجی می کنند ، اگر در برابر تغییرات حرارتی در محل آزمایش قرار گیرند ، دچار خطای اندازه گیری خواهند شد. · استفاده از قطعات و اجزای اضافی در سیستم های اندازه گیری سبب بالا رفتن هزینه می شود و احتمال وارد شدن نویز و ایجاد خطا را افزایش می دهد. 〔2〕 · ...
سیستم های ابزار دقیق ، کالیبراسیون و خطا
سیستم های ابزار دقیق ، کالیبراسیون و خطا ابزار دقیق ، موضوعی است که در علوم ، مهندسی و پزشکی دارای اهمیت اساسی است. در واقع اندازه گیری ، شرط لازم برای کنترل همه عملیات فیزیکی است. در حالت کلی یک سیستم اندازه گیری را می توان جزو یکی از دو گونه ی زیر دانست: · نوع اول ، اندازه گیرهای آزمایشگاهی و یا تجربی است که برای قسمت های تحقیق و توسعه کاربرد دارد. مهم ترین نکته ای که طراح وسایل اندازه گیری جهت کارهای تجربی باید در نظر داشته باشند ، کیفیت اجرای اندازه گیری است. برای بدست آوردن داده های حاصل از تحقیقات ، قابلیت تکرار ، دقت اندازه گیری ، رفتار خطی ، قابلیت اعتماد به نتایج در حد نسبتا بالایی لازم است. قیمت تمام شده ی این نوع سیستم معمولا (اما نه همیشه) از درجه ی دوم اهمیت برخوردار است. · نوع دوم سیستم های ابزار دقیق ، آن هایی هستند که قسمتی از یک وسیله ی شناخته شده را تشکیل می دهند که معمولا این وسایل ، محصولات تجاری هستند. این سیستم ها معمولا ابزارهایی با کیفیت پایین تر از آن چه در تحقیقات استفاده می شود کاربرد دارد. دلیل عمده ی سازندگان آن ها این است که باید سیستم کاملی که وسیله ی اندازه گیری ، جزیی از آن است ، با قیمت قابل قبول تولید شود.] 16[ لوازم اندازه گیری را می توان به عنوان سیستمی در نظر بگیریم که در آن یک ارتباط بین پارامتری که می خواهیم آن را اندازه گیری کنیم و تعدادی متغییرهای فیزیکی دیگر ، برقرار است. متغییر دوم به عنوان وسیله ی ارتباط اطلاعات درباره ی متغییر اول به شخص مشاهده گر و یا به دیگر دستگاه های اندازه گیری و با سیستم کنترلی به کار می رود. به عنوان شاخص برای این که یک رابطه ی تابعی تعریف شده چه کیفیتی دارد ، را می توان از کالیبراسیون دینامیکی و استاتیکی مورد نظر به دست آورد. یک سیستم اندازه گیری را می توان به عناصر جزیی تر تقسیم بندی کرد. اگر این سیستم را که بین محیط اندازه گیری و مشاهده گر واقع شده ، بخواهیم در نظر بگیریم در ابتدا عنصر حسگر اولیه را خواهیم داشت و بعد از آن ترانسدیوسر ، تبدیل اطلاعات ، انتقال اطلاعات ، ذخیره ی اطلاعات / دسترسی به اطلاعات و در نهایت ارائه ی اطلاعات را خواهیم داشت. هر سیستم اندازه گیری ، شامل تعدادی و یا همه ی این اجزاء است. اگر رفتار عناصر سیستم کاملا شناخته شده باشد ، آن گاه می توان عمل سیستم را ارزیابی کرد. اطلاعاتی که دربردارنده ی حالت سیستم فیزیکی است ، توسط تغییر یکی از خواص سیستم به دست می آید.] 16[ 3-1-تحلیل خطا و روش اجرای یک سیستم اندازه گیری کیفیت اجرای هر نوع وسیله ی اندازه گیری به دو عامل مرتبط است. عامل اول مشخصه ی ایستا و عامل دوم مشخصه ...
تولید انرژی الکتریکی از سیستم ترمز هواپیما!
تولید انرژی الکتریکی از سیستم ترمز هواپیما!یک تیم مهندسی از دانشگاه لینکلن دریافته اند که از گرمای تولید شده در تایرها در هنگام فرود می توان برای تولید الکتریسیته استفاده نمود.یک تیم مهندسی از دانشگاه لینکلن با سرمایه گذاری مرکز تحقیقاتی EPSRC تلاش می کند تا انرژی گرمایی که در هنگام فرود هواپیما توسط سیستم ترمز چرخها ایجاد می شود را توسط یک موتور مولد به الکتریسیته تبدیل کند. این انرژی الکتریکی ذخیره شده و در زمان تاکسی کردن هواپیما روی زمین مورد استفاده قرار می گیرد. بدین ترتیب در استفاده از موتورهای جت پرمصرف هواپیما صرفه جویی شده و آلودگی های صوتی و گازهای خروجی را در هنگام حرکت روی باند فرود از بین برد.به گزارش گروه هوافضای هیتنا تاکسی کردن، بدون استفاده از موتور هدفی است که صنایع هوایی در اروپا تا سال 2020 بدنبال آن هستند. این مورد می تواند موجب آسایش مردمی شود که در نزدیکی فرودگاه ها زندگی می کنند چراکه موتورهای جت در هنگام تاکسی صدا و آلودگی زیست محیطی زیادی تولید می کنند.پروفسور استوارت مدیر این تیم مهندسی تخمین زده بعنوان مثال یک هواپیمای ایرباس 320 در هنگام فرود حدود 3 مگاوات انرژی تولید می کند. همچنین دانشگاه لینکلن در حال حاضر بدنبال بررسی روشهای دیگر برای تولید انرژی در هنگام فرود می باشد. یکی از این روشها تولید الکتریسیته از اندرکنش حلقه های مسی جاسازی شده در باند فرود و آهنرباهای متصل شده در زیر هواپیما می باشد. این پروژه نیز همانند بسیاری از پروژه ها با چالش هایی از جمله کاهش هزینه و بهینه سازی تولید انرژی در روند پیشرفت خود مواجه است. یکی از مواردی که می تواند در این تحقیق بهینه شود تعداد مولدها و میزان تولید آنها می باشد. همچنین در این پروژه که ایده آن از سال 2008 کلید خورده دانشگاه لوبورو همکاری نموده است.
تمام دانشگاه های مردانه و زنانه کنکور/ ۲۹ دانشگاه تک جنسیتی دانشجو می پذیرند

دانشگاه تربیت دبیرشهیدرجایی تهران، دانشگاه علوم قضایی وخدمات اداری-وابسته به قوه قضاییه، مجتمع آموزش عالی آیت اله العظمی حایری-میبد، دانشگاه صنعتی قم، دانشگاه صنعتی مالک اشتر-وابسته به وزارت دفاع، دانشگاه صنعتی هویزه- سوسنگرد، دانشکده فنی ومهندسی گلبهار(استان خراسان رضوی)، مجتمع آموزش عالی زرند، مرکز آموزش عالی شهرضا، مرکز آموزش عالی فیروزآباد، مرکز آموزش عالی کاشمر، مرکز آموزش عالی لامرد و مرکز آموزش عالی محلات در بخش دولتی پذیرش دانشجوی مرد را در دستور دارند. تک جنسیتی مردانه زنانه بخش دولتی دانشگاه تربیت دبیرشهیدرجایی دانشگاه علوم قضایی و خدمات اداری مجتمع آموزش عالی ایت اله العظمی حایری دانشگاه صنعتی قم دانشگاه صنعتی مالک اشتر دانشگاه صنعتی هویزه دانشکده فنی ومهندسی گلبهار مجتمع آموزش عالی زرند مرکز آموزش عالی شهرضا مرکز آموزش عالی فیروزآباد مرکز آموزش عالی کاشمر مرکز آموزش عالی لامرد مرکز آموزش عالی محلات دانشگاه الزهرا(س) دانشگاه دخترانه حضرت معصومه(ع) دانشگاه فرزانگان سمنان دانشگاه کوثر بجنورد دانشگاه نهاوند دانشکده فنی وحرفه ای دختران تهران(دکترشریعتی) دانشکده ریاضی و کامپیوتر خوانسار دانشگاه حضرت نرجس(س)رفسنجان بخش غیردولتی موسسه غیرانتفاعی صدرالمتالهین-تهران دانشگاه غیرانتفاعی امیرالمومنین(ع) -اهواز موسسه غیرانتفاعی ال طه – تهران موسسه غیرانتفاعی المهدی -اصفهان موسسه غیرانتفاعی حکیم طوس مشهد موسسه غیرانتفاعی شکوه شرق- زاهدان موسسه غیرانتفاعی فاطمیه شیراز موسسه غیرانتفاعی فیض الاسلام -خمینی شهر در صورتی که سوالی در رابطه با این خبر دارید میتوانید با مرکز مشاوره تلفنی پیام نور تماس بگیرید : تماس از استان تهران : 9092301611 تماس از سایر شهرهای ایران : 9099071612
کتاب مدلسازی و شبیهسازی دینامیک اجسام پرنده منتشر شد

کتاب مدلسازی و شبیهسازی دینامیک اجسام پرنده منتشر شدکتاب مدلسازی و شبیهسازی دینامیک اجسام پرنده، اثر پیتر اچ زپیفل با ترجمه آقایان دکتر رضا اسماعیلزاده و مهندس محمدعلی الهیان توسط انتشارات دانشگاه صنعتی امیرکبیر منتشر و به بازار کتاب عرضه شد. این کتاب در دو بخش مدلسازی نامتغیر دینامیک پرواز و شبیهسازی رایانهای وسایل پرنده هوافضایی- نظری و عملی نوشته شده است. بخش اول مبتنی بر مبانی ریاضی مدلسازی با استفاده از تانسورها، ماتریسها و دستگاههای مختصات دکارتی است. جایگزینی مشتق زمانی معمولی با مشتق زمانی دورانی و استفاده از تبدیل اویلر دستگاهها، تنظیم معادلات حرکت به صورت تانسور، که تحت تبدیلهای مختصات وابسته به زمان تغییرناپذیرند را ممکن می سازد. قانون نیوتن معادلات انتقالی را و قانون اویلر معادلات وضعیت دورانی را تعیین میکنند. معادلات اغتشاشی و مشتقات آیرودینامیکی مدلسازی دینامیک پرواز را کامل میکنند. بخش دوم شامل اعمال مفاهیم فوق به وسایل پرنده هوافضایی است. شبیهسازی ساده سه درجه آزادی مسیر برای هواپیماها، راکتها و وسایل پرنده تک مرحلهای از لحظه شلیک تا قرار گرفتن در مدار تهیه میشود. با افزودن دو درجه آزادی دورانی، شبیهسازیهای پنج درجه آزادی بهدست میآید. شبیهسازی موشکهای کروز، موشکهای رهگیر هوایی و هواپیما همراه با سیستمهای کنترل، هدایت و ناوبری پرواز معرفی میشوند که با شبیهسازی شش درجه آزادی موشکها و هواپیمای ابرصوت به اوج خود میرسد. اجزاء اینسیستمها مفصل مدلسازیخواهندشد. آیرودینامیک، خلبانهایخودکار، عملگرها، سیستمهای ناوبری اینرسی و جستجوگرها بهطور کامل با معادلاتحرکت انتقالی و وضعیت دورانی تلفیق میشوند. با بحث شبیهسازهای بلادرنگ پرواز و نظری اجمالی بر بازی جنگ بخش دوم پایان مییابد. این کتاب برای تمام افرادی که در حوزه دینامیک و شبیهسازی پرواز اجسام پرنده کار میکند مطالب مفید فراوانی خواهد داشت. در حال حاضر این کتاب بهعنوان متن درسی در مقاطع تحصیلات تکمیلی رشته مهندسی هوافضا در بسیاری از دانشگاههای جهان مورد استفاده قرار میگیرد.
آشنایی با سری موشک های هاوک
موشک سطح به هوای میانبرد هاک (MIM-23 HAWK) ساخت شرکت آمریکایی(Raytheon) است. Hawk مخفف Homing All the Way Killer میباشد. هدف ابتدایی از طراحی این موشک نابود کردن هواپیماهای دشمن بود که با توسعه این موشک، از آن در نابود کردن موشکهای دیگر هم استفاده میشد . این موشک در سال 1960 وارد خدمت گردید اما باتوجه به برنامههای مختلف و متنوع بهینهسازی و توسعه که بر روی آن پیاده شده،این موشک هنوز هم مورد استفاده قرار میگیرد. توسعه و بهینهسازیهای مختلف روی موشک هاک عاقبت به ساخت سیستم دفاع موشکی پاتریوت (MIM-104 Patriot ) منجر شد . از سال 1994 جایگزینی موشک هاک با نمونههای دیگر با توجه یگان عملیاتی و ماموریتهای آن یگانها در ارتش آمریکا شروع گردید و در سال 2002 موشک موفق هاک رسما از خدمت در ارتش آمریکا بازنشسته شد . آخرین یگان استفادهکننده از موشک هاک، یگان تفنگداران دریایی آمریکا(US Marine Corps ) بودند که موشک دوش پرتاب FIM-92 Stinger را جایگزین موشک هاک کردند. این موشک همچنان در خارج از آمریکا و در کشورهای اروپای غربی و ژاپن تولید میشود . موشک هاک در جنگهای مختلفی شرکت کرده و بنا بر آمار اعلام شده تا کنون 40 هزار فروند از این موشکها ساخته شده است. درصد اطمینان کارایی این موشک در نمونههای ابتدایی 56% و در آخرین نمونه ها 85% بوده است. ۱-تاریخچه طراحی و ساخت موشک هاک : کار طراحی و ساخت سیستم موشکی هاک از سال1952 شروع شد و جزیی از طرح ارتش آمریکا برای ساخت یک موشک میانبرد سطح به هوا با سیستم هدایت نیمه فعال راداری گردید. در سال1954 قرارداد ساخت لانچر این موشک با شرکت نورثروپ و قرارداد ساخت رادار و سیستم کنترل آتش و موشک با شرکت ریثون پیمانکار اصلی پروژه بسته شد . اولین نمونه موشک ساخته شده این طرح به اسم (XSAM-A-18 ) با موتور XM3 در ژوئن 1956 ساخته شد . جولای1957 نمونه کامل شده ارائه گردید اما پس از مدت کمی با روشن شدن معایب این مدل از موتورها، از موتورهای آیروجت (Aerojet M22E7) بجای مدل قبلی استفاده شد که این مدل هم نامطمئن نشان داد و با موتورهای اصلاح شده آیروجت (M22E8 ) جایگزین گردید. نمونه ابتدایی موشک هاک در سال1959 در اختیار ارتش آمریکا قرار گرفت و از سال1960 به طور رسمی در اختیار تفنگداران نیروی دریایی آمریکا(US Marine Corps) قرار گرفت. پیچیدگی زیاد سیستم پدافند موشکی هاک و استفاده از سامانههای الکتریکی در این سیستم باعث شد این سیستم پدافندی قادر به فعالیت مستمر بیش از 43 ساعت نباشد اما این مدت در نمونههای بهینهسازی شده موشک هاک به 130الی170 ساعت و در آخرین نمونهها به 300 الی400 ساعت افزایش داده شده است. ۲-اجزای تشکیل دهنده سیستمپدافندموشکی هاک (PAR (Pulse Acquisition Radar به معنای رادار ...
آشنایی با اویونیک به زبان ساده
قسمت زیادی از دانش الکترونیک در یک هواپیما جهت تعیین موقعیت هواپیما نسبت به نقطه ای ثابت در روی زمین استفاده میگردد و این کار را میتوان به طرق متعددی انجام داد.در صورت مشخص بودن موقعیت هواپیما،خلبان می تواند مراحل بعدی ناوبری را با استفاده از دانستن روابط بین روند تغییرات و زمان به انجام رساند.با استفاده از علایم رادیویی می توان فاصله یا جهت را نیز اندازه گیری نمود و یا ترکیبات متعددی از این پارامتر ها را جهت تعیین موقعیت هواپیما بکار برد.به عنوان مثال اگر هم فاصله و جهت نسبت به ایستگاه زمینی مشخص باشد،خلبان می تواند موقعیت هواپیما را به وسیله این دو فاکتور تعیین نماید این طریقه ناوبری به (Rho-Theta) نامیده میشود (رو) مسافت و (تتا) زاویه را نشان میدهد.اگر فاصله هواپیما نسبت به دو ایستگاه زمینی مشخص باشد،....قسمت زیادی از دانش الکترونیک در یک هواپیما جهت تعیین موقعیت هواپیما نسبت به نقطه ای ثابت در روی زمین استفاده میگردد و این کار را میتوان به طرق متعددی انجام داد.در صورت مشخص بودن موقعیت هواپیما،خلبان می تواند مراحل بعدی ناوبری را با استفاده از دانستن روابط بین روند تغییرات و زمان به انجام رساند.با استفاده از علایم رادیویی می توان فاصله یا جهت را نیز اندازه گیری نمود و یا ترکیبات متعددی از این پارامتر ها را جهت تعیین موقعیت هواپیما بکار برد.به عنوان مثال اگر هم فاصله و جهت نسبت به ایستگاه زمینی مشخص باشد،خلبان می تواند موقعیت هواپیما را به وسیله این دو فاکتور تعیین نماید این طریقه ناوبری به (Rho-Theta) نامیده میشود (رو) مسافت و (تتا) زاویه را نشان میدهد.اگر فاصله هواپیما نسبت به دو ایستگاه زمینی مشخص باشد،تعیین مکان نسبت به دو ایستگاه امکان پذیر میباشد اما با داشتن فاصله نسبت به یک ایستگاه ثالث میتوان موقعیت کلی را نسبت به زمین تعیین نمود این طریقه ناوبری (Rho-Rho-Rho) نامیده میشود.موقعیت هواپیما را همچنین می توان به وسیله اندازه گیری زاویه نسبت به دو ایستگاه زمینی تعیین نمود که این طریقه ناوبری (Theta-Theta) نامیده میشود.هر ترکیبی از سه طریق ناوبری میتواند مبنایی برای اغلب سیستم های ناوبری اویونیک باشد.البته سیستم های داپلر و INS (Inertial Navigation System) از این قاعده مستثنی هستند.در سیستم ناوبری داپلر به وسیله استفاده رادار و پژواک زمینی و حسابگر های مختلف میتوان موقعیت را تعیین نمود و روش ناوبری INS که توسعه یافته همان سیستم ناوبری ابتدایی است،بر اساس پارامتر های موقعیت نقطه شروع،جهت،سرعت و مدت زمان موقعیت را،در هر زمان تعیین مینماید.در یک هواپیما از سیستم های ناوبری مختلفی استفاده می گردد که عبارتند از :# سیستم ILS ...
آشنايي با هواپيماي بدون سرنشين PREDATOR B
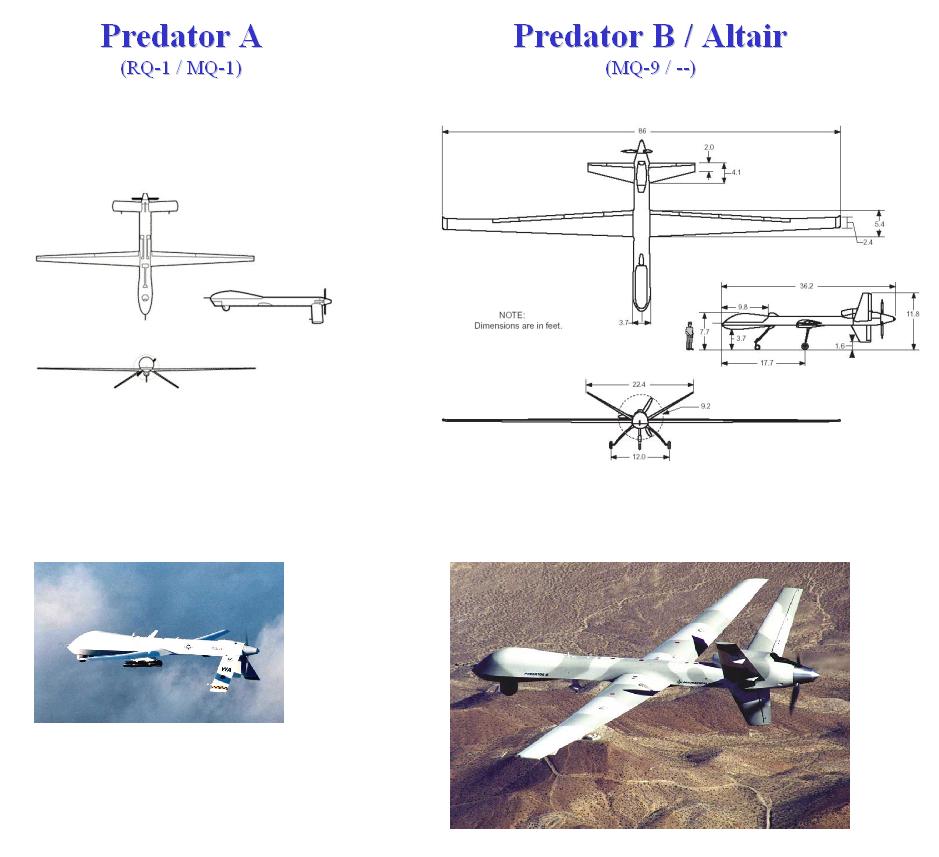
ماوریتهای قابل انجام توسط این پهباد عبارتند از : شناسایی ، دیده بانی و مراقبت از منطقه ، هدف یابی و پرتاب تسلیحات که به واسطه نیاز به این قابلیتها این پهباد گسترش یافت. این پهباد گنجایش حمل چند ردیف غلاف مختلف خارجی و داخلی برای حمل مهمات و دیگر تجهیزات را دارد که خصوصیتی قابل توجه است. تفاوتهاي MQ-1_Predator_vs_MQ-9_Predator-Bویژگیها: - ارت باط هوایی سه گانه - بازبینی زوائد پرواز و شفاف کردن سطوح مورد بازبینی - هدایت از راه دور و یا استفاده به صورت کاملاً اتوماتیک - دارای استاندارد ها نظامی - 6 جایگاه ویژه حمل انواع بار و مهمات - استفاده از باند C برای کنترل و هدایت در مسیرهای مستقیم - استفاده از باند KU برای کنترل و هدایت در مسیرهای دارای عوارض و خارج از دید در فواصل دورتر( SATCOM ) - دسترسی آسان به اکثر سیستم های عملیاتی - قابل حمل توسط C-130 - کمتر از 12 ساعت قابلیت جابجایی و تغییر مکان برای قرار گرفتن در موضع جدید مشخصات: - فاصله بين دو بال : 20 متر - طول : 11 متر - موتور : Honeywell TPE 331-10T - حداكثر وزن برخاست : 4763 كيلوگرم - گنجايش سوخت : 1814 كيلوگرم - ميزان بار قابل حمل : از 385 كيلوگرم تا 1361 كيلوگرم بسته به نوع عمليات و ميزان سوخت - تسليحات قابل حمل : Hellfire - GBU-12 laser-guided bombs - GBU-38 Joint Direct Attack Munitions - قدرت : 45 kVA كه بيش از احتياج مي باشد. - تجهيزات مفيد : MTS-B EO/IR camera system - Lynx SAR/GMTI - Multi-mode maritime radar - GPS and INS - UHF/VHF voice و رله هاي خطوط مواصلاتى ارتباطات عملكرد : - حداكثر ارتفاع : 50,000+ ft - حداكثر استقامت و مداومت پروازي : 30+ ساعت - حداكثر سرعت هوايي : : 240+ KTAS
گمانه زنی ها در مورد اضافه کاری روبات فضانورد!

نیروی هوایی ایالات متحده اعلام کرد زمان ماموریت فضاپیمای روبات این کشور با نام X-37B تمدید خواهد شد.روبات فضایی X-37B که ظاهری مشابه شاتل فضایی در ابعاد یک خودرو دارد قبل از ماه مارس به فضا پرتاب شد و در پایان ماه نوامبر با گذشت 270 روز این فضاپیمای کوچک به پایان عمر ماموریت خود نزدیک می شود. نیروی هوایی ایالات متحده در ابتدای پرتاب این وسیله خبری از آن منتشر نکرد اما پس از ماه ها با نزدیک شدن به ضرب العجل ماموریت سکوت خود را شکسته و تنها اعلام کرده X-37B در شرایط مناسبی قرار دارد اما زمان بازگشت آن به زمین هنوز مشخص نیست. به گزارش گروه هوافضای هیتنا گمانه زنی های گوناگونی در مورد علت طولانی تر شدن ماموریت این فضاپیما شده است. عده ای این طولانی شدن را بدلیل به طول انجامیدن ماموریت آن دانسته اند و گروهی دیگر این مورد را در محافظه کار بودن مهندسین طراح این سیستم برای رسیدن به یک حاشیه اطمینان مناسب در پرواز دانسته اند. در این میان عده ای این طولانی شدن را ناشی از درس هایی که ایالات متحده از پرتاب اول این فضاپیما در سال 2010 و طی 224 روز گرفته است می دانند. آنچه به نظر می رسد این پرتاب جدید نسبت به پرتاب قبلی پاسخ های بهتری رادر پی خواهد داشت. در این پرتاب مانورهای مداری به حداقل رسیده است، همچنین طراحی حرارتی بگونه ای است که ساییدگی و شکست و تنش های حرارتی کاهش یابد و این موارد می تواند موجب افزایش عمر ماموریت این فضاپیما در مدار شود و حتی گفته می شود این فضاپیما می تواند یک سال تمام را در فضا باقی بماند!بدون تردید یکی از اهداف ایالات متحده از این پرتاب تست قابلیت اطمینان قطعات این سیستم فضایی برای یک مدت طولانی در فضا می باشد. احتمال دیگری که در مورد ماموریت این فضاپیما وجود دارد این است که از آن بعنوان یک ماهواره نظامی استفاده شود زیرا تعدادی از زیر سیستم های آن شبیه به ماهواره های نظامی می باشد. این روزها خبرهایی مبنی بر ساخت X-37C به گوش می رسد. خبری که گمانه زنی هایی را در مورد آزمایشی بودن پرتاب X-37B ایجاد نموده است. اگر این نظر صحیح باشد X-37C ابعادی بزرگتر خواهد داشت و از آن در ماموریت هایی مانند حمل محموله به ایستگاه فضایی استفاده خواهد شد. به هر حال علت تمدید ماموریت X-37B هر چه باشد باید منتظر ماند و دید که در بازگشت به زمین چه نتایجی از آن استخراج خواهد شد.
پارادايم مديريت اسلامي و بررسي آن در نهج البلاغه
دراين مقاله با اشاره اي به پارادايم هاي مختلف مديريت دولتي و شرح خلاصه اي از ابعاد مختلف آنها و با بررسي سخنان حضرت علي (ع) در مورد مديران و رهبران در نامه هاي ايشان به مالك اشتر و ديگر واليان، جايگاه مديريت اسلامي را در بين ساير پارادايم ها روشن كرده و پيشنهادي در جهت نظم ساختاري نوين متناسب با سيستم حكومت كشور در نظام جمهوري اسلامي ايران ارائه مي نمايد. 1- مقدمهابتدا درباره اصطلاح پارادایم که در این مقاله مورد توجه است تاریخچه ای بیان میکنیم. توماس کوهن فیزیکدان آمریکایی، اولین کسی بود که در دهه 1960 بطور مشخص در کتاب خود به نام ساختار انقلاب های علمی، از اصطلاح پارادایم استفاده کرد. پارادایم دارای ریشه یونانی، به معنای الگو است. از نظر کوهن، در هر دوره زمانی یک شیوه دیدن جهان، هنجار تلقی می شود. کوهن این شیوه نگرش به جهان، که دریک دوره از زمان مورد قبول اکثریت اعضای یک جامعه علمی است، را پارادایم نامید (کوهن، 1976).سیر تکامل دانش مدیریت، باعث پیدایش پارادایم های گوناگونی در این رشته شده است. این پارادایم ها هر یک از دیدگاه خاصی، سازمان و مدیریت را مورد توجه قرار داده اند. یکی از این پارادایم ها، نظریه اقتضایی است. گری دسلر، استاد دانشگاه فلوریدا، از طرفداران دیدگاه اقتضایی بود. این نظریه نقطه مقابل نظریه اصول گرایی فایول است. نظریه اقتضایی، با اصول جهانشمول در مدیریت مخالف است و عقیده دارد که هرسازمان در هر جا نسخه مخصوص به خود می خواهد. در صورتی که بر اساس نظریه اصول گرایی فایول، تنظيم نسخه ای ثابت، برای همه سازمانها امكان پذير است. نظریه اقتضایی نظریه اصوالگرایی را مردود می شمارد و مدیریت به اقتضای زمان و مکان و شرایط و موقعیت را مطرح می کند.اسلام دینی است که به اقتضای زمانهای مختلف و متناسب با شرایط اجتماعی گوناگون، رهنمود های خاصی را ارائه می دهد و مبتنی بر اصول و مبانی عقیدتی می باشد (جاسبی،1380). لذا اسلام با مدیریت اقتضایی سازگار است.2- انواع پارادایم های مختلف مدیریت دولتی موجود در اینجامختصراً سه پارادایم اساسی مدیریت دولتی و مقایسه آن با مدیریت اسلامی را مورد بررسی قرار می دهیم:2-1- مدیریت دولتی سنتینظریه تفکیک سیاست از اداره ویلسون و نظریه بروکراسی وبر، زیر بنای مدیریت دولتی سنتی است. بر اساس نظر ودرو ویلسون، همیشه یک مرکز قدرت در درون هر سیستم دولتی وجود دارد. دانشمند باید این مرکز قدرت را از نظر جایگاه قرار گرفتن آن در سیستم و اینکه صاحب اختیارقدرت چه کسی است شناسایی کند. هنگامی که مرکز اعمال سلطه در سیستم شناسایی شد آنگاه می توان ساختار اختیار را مورد بررسی قرار داد. تئوری اداره ویلسون ...