پروژه متلب کنترل
پروژه ها و مقالات شبیه سازی شده در متلب- برق کنترل

برای دیدن محصولات بیشتر لینکهای زیر را کلیک کنید: برای دیدن پروژه ها و مقالات شبیه سازی شده - هوش مصنوعی و پردازش سیگنال برای دیدن پروژه ها و مقالات شبیه سازی شده -برق قدرت پروژه ها و مقالات شبیه سازی شده کد جیg -بخش اول پروژه ها و مقالات شبیه سازی شده کد جیg -بخش دوم جهت انتخاب پروژه: می توانید با زدن Ctrl+F کلید واژه خود را جستجو کرده و مقاله مناسب را بیابید. مثلا برای مقالات فازی، کلمه فازی را در صفحه جستجو کرده و با توجه به موضوع و سال انتشار و نوع مقاله، کد پروژه یا مقاله مورد نظر را به ایمیل ما بفرستیدیا جهت اطلاع از هزینه پروژه مورد نظر در روزهایی که قیمت پروژه ها نامعلوم است کد آن را به شماره 09378425676 ارسال کنید.لازم است از طریق پیامک ایمیل خود را به همراه کد پروژه ارسال فرمایید تا مراحل دریافت پروژه و پرداخت هزینه را به اطلاع برسانیم.در صورت داشتن سوال در مورد پروژه ها به ایمیل [email protected] ارسال کنید تا در اولین فرصت پاسخگو باشیم بانک مقالات برق کنترل -پروژه ها و مقالات شبیه سازی شده در متلب- ----------------------------------------------------- برای دانلود هر مقاله طبق کد تعیین شده برای هر مقاله, از لینک زیر دانلود نمایید دانلود مقاله بانک اصلی مقالات ،ارزان تر از همه هزینه پرداختی به ازای هر کدمقاله، معادل 76000تومان می باشد کد پروژه g8 عنوان اصلی پروژه : طراحی PID کنترلر برای ستون تقطیر با GA سال ارائه: - نوع مقاله: - گزارش فارسی: دارد کلید واژه : کنترل چند متغیره، الگوریتم ژنتیک ،سیمولینک کد مقاله g12 عنوان اصلی مقاله : An Efficient Transient Analysis Algorithm for Mildly Nonlinear Circuits ترجمه فارسی موضوع مقاله: روش آنالیز بازده گذرای جدید برای مدارهای غیر خطی میلدلی سال ارائه: 2002 نوع مقاله: IEEE گزارش فارسی: دارد کلید واژه : مدارهای ولترا ،برق الکترونیک ،کامپیوتر ،مدارهای غیرخطی Interpolating Fourier series, nonlinear circuits,transient analysis, Volterra series کد مقاله g13 عنوان اصلی مقاله : Based On MCU Auto-adapted Digital PID Fluid Position Control System Design ترجمه فارسی موضوع مقاله: طراخی سیستم کنترل دیجیتال سال ارائه: 2011 نوع مقاله: IEEE گزارش فارسی: دارد کلید واژه : کنترل دیجیتال ،طراحی رویتگر ،تاثیر اغتشاش و نویز بر سیستم Auto-adapted; Digital PID Fluid position control; کد مقاله g14 عنوان اصلی مقاله : Hardware/Software Codesign for a Fuzzy Autonomous Road-Following System ترجمه فارسی موضوع مقاله: طراحی سخت افزار/نرم افزار و کد برای سیستم دنبال کننده جاده خودکار فازی سال ارائه: 2010 نوع مقاله: IEEE گزارش فارسی: دارد کلید واژه : رباتیک ،فازی ، Embedded system, field programmable ...
فهرست پروژه های برق انجام شده با نرم افزار MATLAB
1- شبیه سازی بازیاب دینامیکی ولتاژ - DVR در سیمولینک نرم افزار متلب ( MATLAB ) ************************************** 2- شبیه سازی مقاله Mixed multicell cascaded multilevel inverter در سیمولینک نرم افزار متلب ( MATLAB ) ************************************** 3- شبیه سازی مقاله زیر درسیمولینک نرم افزار متلب ( MATLAB ) New configuration of stacked multicell converter with reduced number of DC voltage sources ************************************** ۴- شبیه سازی مقاله زیر در نرم افزار MATLAB Double Flying Capacitor Multicell Converter Based on Modified Phase-Shifted Pulsewidth Modulation ************************************** ۵- شبیه سازی اینورتر چند سطحی چند سلولی flying capacitor (خازن شناور )در سطوح ولتاژ گوناگون در نرم افزار MATLAB ************************************** ۶- شبیه سازی اینورتر چند سطحی چند سلولی Cascade با مدولاسیون PWM شیفت فازی (Phase shifted PWM) در سطوح ولتاژ گوناگون در نرم افزار MATLAB ************************************** ۷- شبیه سازی اینورتر چند سطحی دیود کلمپ Diod clamped multilevel inverter در سطوح ولتاژ گوناگون در نرم افزار MATLAB ************************************** ۸- شبیه سازی مقاله زیر در نرم افزار MATLAB A New Mixed Stacked Multicell Converter with Interesting Advantages ************************************** ۹- شبیه سازی اینورتر چند سطحی چند سلولی Stacked multicell multilevel inverter در سطوح ولتاژ گوناگون در نرم افزار MATLAB ************************************** ۱۰- شبیه سازی فیلتر اکتیو سه فاز با استفاده از تئوری توان لحظه ای یا p-q در نرم افزار MATLAB ************************************** ۱۱- شبیه سازی فیلتر اکتیو تکفاز و سه فاز با استفاده از روش کنترلی ساده غیر مستقیم ( Indirect ) در نرم افزار MATLAB ************************************** ۱۲- شبیه سازی اینورتر سه فاز با مدولاسیون Space Vector در نرم افزار MATLAB ************************************** ۱۳- شبیه سازی اینورتر تکفاز پل کامل DC به AC بر اساس ترانزیستور IGBT و کنترل کننده PWM در MATLAB ************************************** ۱۴- شبیه سازی مبدل ( چاپر ) dc به dc از نوع ( بوست ) boost (حلقه باز و حلقه بسته ) در نرم افزار MATLAB ************************************** ۱۵- شبیه سازی مبدل ( چاپر ) dc به dc از نوع ( چوک ) Ćuk (حلقه باز و حلقه بسته ) در نرم افزار MATLAB ************************************** ۱۶- شبیه سازی اینورتر سه فاز با هدایت ۱۸۰ درجه و هدایت ۱۲۰ درجه در نرم افزار MATLAB ************************************** ۱۷- شبیه سازی کنترل سرعت موتور DC با استفاده از کنترل کننده PI در نرم افزار MATLAB ************************************** ۱۸- شبیه سازی عملکرد تریستور ( Thyristor ) در بارهای مختلف در نرم افزار MATLAB ************************************** ۱۹- شبیه سازی مقاله زیر در نرم افزار MATLAB ( بازیاب دینامیکی ولتاژ - DVR ) New hybrid multicell inverter topology with minimum number of switches for a dynamic voltage restorer ************************************** ۲۰- شبیه سازی مبدل ( چاپر ) dc به dc از نوع buck (حلقه باز و حلقه بسته) در نرم افزار MATLAB ************************************** ۲۱- ...
فروش پروژه کنترل تطبیقی مدل آزاد (MFAC) با نرم افزار MATLAB
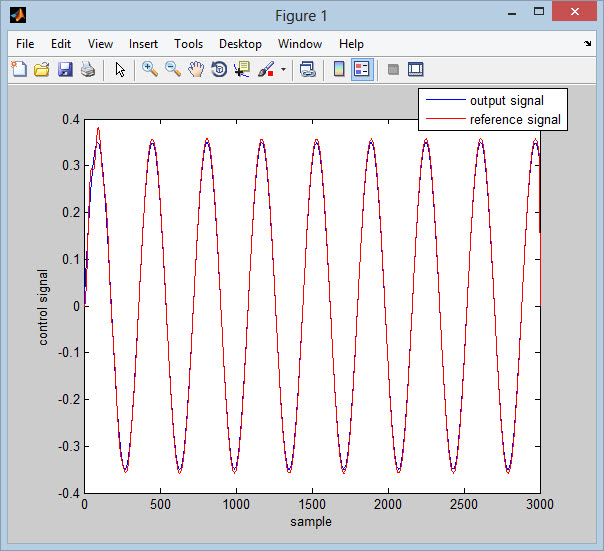
كد: 1264 عنوان پروژه: فروش پروژه کنترل تطبیقی مدل آزاد (MFAC) با نرم افزار MATLAB قالب بندی: m - slx دسته: MATLAB قيمت: 20.000 تومان قابليت اجرا در نرم افزار: MATLAB شرح مختصر: فروش پروژه کنترل تطبیقی مدل آزاد (MFAC) با نرم افزار MATLAB عكس خروجی برنامه برای خريد اين پروژه با شماره 09360703858 يا آدرس ايميل [email protected] در تماس باشيد. أ: 2131
دانلود پروژه کنترل خطی چرخ
دانلود پروژه کنترل خطی چرخ دانلود پروژه کنترل خطی چرخ اگر از اینرسی چرخ صرف نظر کنیم در اینصورت sys به جرم و دمپر تبدیل میشود Y(s)/U(s)=1/(1000s+50) Y(s)=سرعت U(s)=نیرو پاسخ حلقه باز به ورودی پله ای(نیروی برابر 500نیوتن) کنترل کننده PID با شرایط 1)وقتی نیروی موتور 500نیوتن حداکثر سرعت باید برابر 10 متر بر ثانیه باشد 2)زمان خیز باید کمتر از 5ثانیه باشد(risetime) 3)جهش کمتر از 10درصد خطای حدود 2درصد در حالت ماندگار قابل قبول است مطلوبست: بدست آوردن صفر و قطب های حلقه باز بدست آوردن صفر و قطب های حلقه بسته در حضور کنترل کننده PID رسم مکان هندسی ریشه ها رسم دیاگرام نایکوییست حل: ابتدا کد زیر را در متلب وارد می کنیم: clearall; clc; num=[1]; den=[1000 50]; g=tf(num,den); [z,p,k]=tf2zp(num,den); sisotool(g) این کد می تواند صفرها و قطبهای تابع حلقه باز را نمایش دهد: z = Empty matrix: 0-by-1 p = -0.0500 k = 1.0000e-003 همانطور که در جواب فوق دیده می شود صفر نداریم و تنها یک قطب در -0.0500 داریم و نیز بهره برابر 1.0000e-003 است. حالا برای یافتن صفر و قطبهای کنترلر مان از ابزار SISOTOOL کمک می گیریم: یک عدد قطب و یک صفر انتخاب می کنیم و آنقدر آنها را جابجا می کنیم تا تمامی خواسته های مسئله برآورده گردد: همانطور که در شکل می بینید زمان نشست کمتر از 5 ثانیه شده است. یکی دیگر از خواسته های مسئله اورشوت است که باید زیر ده درصد باشد این امر هم محقق شده است: سیستم زیر نمایش دهنده سیستم مورد دلخواه ماست که کنترلر PID آن یک قطب در 56 ویک صفر در 8.8 داردو گین آن 4432 است نمودار مکان هندسی این سیستم این گونه می شود: دیاگرام بود این سیستم نشان از پایداری سیستم دارد: همانطور که می بینید گین مارجین و فیز مارجین هر دو در حدود خود قرار گرفته اند وسیستم پایدار است البته این امر را می توانستیم پیش بینی کنیم چون هیچ صفر و قطبی در سمت راست محور کار نگذاشته ایم دیاگرام نایکویست این سیستم به شرح زیر است: صفر و قطب تابع حلقه بسته: برای اینکار هم از کدهای زیر استفاده نمودیم: clearall; clc; num=[1]; den=[1000 50]; g=tf(num,den); [z,p,k]=tf2zp(num,den); [num2,den2]=zp2tf(-1/8.8,-1/56,4432); [numf,denf]=feedback(num,den,num2,den2); F=tf(numf,denf) [z2,p2,k2]=tf2zp(numf,denf) که جواب به صورت زیر شده است: Transfer function: s + 0.01786 ————————- 1000 s^2 + 4500 s + 504.5 z2 = -0.0179 p2 = -4.3848 -0.1151 k2 = 1.0000e-003
کنترل فازی TSK نوع 2 مقاوم، برای سیستمهای مقیاس وسیع
مقدمه: تئوري مجموعههای فازي و منطق فازي را اولین بار پرفسور لطفی زاده در رسالهای به نام «مجموعههای فازي – اطلاعات و کنترل» در سال 1965 معرفی نمود. هدف اولیه او در آن زمان، توسعه مدلی کارآمدتر براي توصیف فرآیند پردازش زبانهای طبیعی بود پس از معرفی مجموعهای فازي در سال 1965، زاده، مفاهیم الگوریتمهای فازي را در سال 1968، تصمیم گیري فازي را در سال 1970 و ترتیب فازي را در سال 1971 مطرح نمود. کاربردهاي اولیهای نظیر کنترل موتور بخار و کنترل کوره سیمان نیز تئوري فازي را به عنوان یک زمینه جدید مطرح کرد. کنترل سیستمهای غیر خطی با استفاده از روشهای سیستماتیک جهت ایجاد شرایطی پایدار و تضمین عملکرد مقاوم دشوار است. با استفاده از روش مدلسازی فازی TS، مدل غیر خطی از سیستم بدست میآید. دو روش برای ایجاد مدل فازی TS، وجود دارد. یکی اینکه با استفاده از معادلات ریاضی مربوط به سیستم، همانند مرجع ]2[ به طور مستقیم مدل فازی سیستم را بدست آوریم؛ و دیگری با استفاده از روشهای شناسایی یا تکنیکهای مدلسازی که در مراجع ]1[، ]3[، ]4[، ]5[، ]6[ و ]7[ بیان شده، مدل فازی سیستم را بدست آوریم. مدل فازی TS، سیستم غیر خطی را به صورت جمعی از زیر سیستمهای وزن داده شده بیان میکند. این ساختار ویژه، آنالیز سیستم را آسانتر میکند. معمولاً در هر یک از این زیر سیستمها، مدل سیستم به صورت خطی بیان میشود. در نتیجه برای هر یک از آنها یک کنترلر فازی طراحی خواهد شد؛ و در نهایت کنترلر فازی مجموع زیر کنترلرهای وزن داده شده است. در این حالت سیستم فازي به عنوان یک کنترل کننده حلقه بسته استفاده میشود، یعنی خروجیهای فرایند را اندازه گیري کرده و به طور همزمان عملیات کنترل را انجام میدهد. کاربرد سیستمهای فازی نوع 1 در کنترل سیستمهای غیر خطی و پیچیده به خوبی اثبات شده است [8] ,[9] . سیستم فازی نوع 1 به طور کامل قادر به مدلسازی عدم قطعیت نیست و نمیتواند آن را کاهش دهد. [10] هر ورودی سیستمهای فازی نوع 1 با درجه عضویتی به صورت اعداد کلاسیک نشان داده میشود، در حالی که در سیستمهای فازی نوع 2 این درجه عضویت با مجموعههای فازی نشان داده میشود. سیستمهای فازی نوع 2، اولین بار در سال 1975 توسط زاده بیان شد [11] . عدم قطعیت در مجموعههای فازی نوع2 میتواند در شکل و موقعیت سیستمهای فازی نوع 1 نشان داده شود[12] . در مرجع[13]، پایداری سیستمهای فازی IT2 TSK توسط Wu-Mendel طراحی شده است. عوامل بسیار زیادي در سیستمهای فازی TSK دخالت دارند بنابراین روشهای استنتاج جدیدی در سیستمهای فازی TSK نوع 2 پیشنهاد شده است که به طور موثری جایگزین روشهای کاهش مرتبه ...
پروژه های متلب
پروژه های متلبجهت سفارش پروژه:می توانید با زدن Ctrl+F کلید واژه خود را جستجو کرده و موضوع مناسب را بیابیدو برای سفارش پروژه برای ما ایمیل بفرستید یا جهت اطلاع از هزینه پروژه مورد نظر موضوع پروژه را به شماره 09390134749 ارسال کنید.لازم است از طریق پیامک ایمیل خود را به همراه موضوع پروژه ارسال فرمایید تا مراحل دریافت پروژه و پرداخت هزینه را به اطلاع برسانیم.در صورت داشتن سوال در مورد پروژه ها به ایمیل [email protected] ارسال کنید تا در اولین فرصت پاسخگو باشیم.www.1proje.ir تشخیص چهرهFace Recognition and Detection •تشخیص چهره به روش PCA با استفاده از دیتابیس •تشخیص چهره با استفاده از هیستوگرام تصاویر (به همراه مقاله) •تشخيص چهره انسان با استفاده طبقه بندي كننده چندخطي •تشخيص چهره انسان به روش تحلیل تفکیکی خطی دو بعدی( 2D-LDA ) به همراه مقاله •تشخیص چهره از روی چشم به روش شبکه عصبی •تشخیص اثر انگشت به روش دیتابیس (به همراه مقاله) •تشخیص حرکت از طریق ورودی دوربین یا وبکم •تشخیص کارکتر و عدد در تصویر OCR •تشخیص و شمارش یک حرف خاص در تصویر •تشخیص عدد فارسی در تصویر (به همراه آموزش فارسی) •تشخیص حروف فارسی در تصویر به روش تطبیق الگو •تشخیص حروف فارسی در تصویر به روش شبکه عصبی •برنامه تشخیص بارکد (پردازش تصویر) •ترمیم تصویر Image inpainting •ترمیم ویدئو Video inpainting •کاهش نویز در تصویرNoise Canceling •تشخیص لبه تصویر توسط الگوریتم کلونی مورچه ها ACO (به همراه مقاله) •تشخیص دایره در تصویر •پنهاننگاری تصاویر یا Steganography با متلب •پنهان نگاری تصویر به روش DCT •پنهان نگاری تصویر در فایل صوتی •فشرده سازی تصاویر اثر انگشت Fingerprint Image Compression •تشخیص سرعت خودرو به کمک پردازش تصویر •تشخیص تعداد خودرو به کمک پردازش تصویر •جدا سازی دندان از تصاویر X-ray به کمک پردازش تصویر •فشرده سازی تصاویر به روش های DTC2 ، SVD و WAVELET •تعیین سلامت میوه مانند سیب به کمک پردازش تصویر (كيفيت سنجی) •برنامه شناسایی تومور مغزی در عکس گرفته شده از مغز MRI •تشخیص غدد سرطانی (سرطان سینه) به کمک پردازش تصویر •تشخیص و شمارش دانه های برنج در تصویر •آرایشگر مجازی (نمونه ای از تشخیص چهره) •استخراج پلاک خودرو از کل تصویر •شبیه سازی مدولاسيون پالسهای كدشده PCM •شبیه سازی و بررسی انواع اتصال کوتاه در ژنراتور •شبیه سازی ورقه کردن فلز •شبیه سازی بازوی ربات •بررسی کلیه توابع توزیع در متلبDistributions functions •پیاده سازی روش گوشه شمال غربی North-West Corner Method •بهینه سازی تنش در تراس Truss Optimization •حل سودوکو با متلب •بازی دوز به زبان متلب •حل معمای هشت وزیر (قابل اجرا برای n وزیر) •حل ...
پروژه متلب
درخواست خود را با فرستادن ایمیل به [email protected] انجام دهید نحوه سفارش پروژه متلب ، سفارش پروژه متلب ، سفارش پروژه مطلب ، سفارش انجام پروژه متلب ، سفارش پروژه با متلب ، پروژه Matlab ، پروژه تشخیص اعداد Matlab ، انجام پروژه Matlab ، دانلود پروژه Matlab پروژه آماده متلب , مقالات شبیه سازی شده در متلب , پروژه متلب پردازش تصویر , پروژه متلب محاسبات عددی , پروژه متلب برق پروژه آماده متلب ، آموزش متلب ,تعویض پروژه، پروژه متلبانجام پروژه های برق کنترل، برق قدرت، الکترونیک قدرت،مهندسی پزشکی،کامپیوتر،هوش مصنوعی،مخابرات و مکانیکdsp, bspانجام پروژه با نرم افزار متلب دانلود پروژه هاي انجام شده با نرم افزار متلب تدريس خصوصي دروس مهندسي برق تدريس خصوصي دروس مهندسي شيمي انجام پروزه با نرم افزار matlab انجام پروژه با نرم افزار مطلب دانلود نرم افزار متلب دانلود نرم افزار simulink پروژه هاي شبيه سازي شده با نرم افزار سيمولينک پروزه هاي شبيه سازي شده با نرم افزار simulink مقالات شبيه سازي شده با نرم افزار متلب دانلود مقالات شبيه سازي شده با نرم افزار متلب انجام پروژه مکانيک با متلب ،انجام پروژه محاسبات با متلب ، انجام پروژه برنامه نويسي با متلب، انجام پروژه برق با متلب ،انجام پروژه بهينه سازي با متلب، انجام پروژه فازي با متلب ، انجام پروژه پردازش تصوير با متلب ،انجام پروژه پردازش سيگنال با متلب پروژه مهندسي برق با نرم افزار matlab پروزه مهندسي مکانيک با نرم افزار matlab پروژه مهندسي شيمي با نرم افزار matlab پروژه مهندسي برق با نرم افزار simulink پروزه مهندسي مکانيک با نرم افزار simulink پروژه مهندسي شيمي با نرم افزار simulink آموزش نرم افزار متلب matlab,image processing toolbox پروژه مهندسي برق نرم افزار matlab پروژه مهندسي برق نرم افزار متلب پروژه مهندسي برق نرم افزار مطلب 09157718841 یوسفی
کنترل مستقیم گشتاور با استفاده از مدولاسیون بردار فضایی
مقدمه تحريك موتور القايي كه با يك مبدل ماتريسي تغذيه مي شود به معكوس ساز معمولي برتري دارد زيرا هيچ نوع ازخازنهاي بزرگ با اتصال DC با عمر محدود قابليت شارش توان دوسويه، جريانهاي ورودي - خروجي سينوسي و نيز يك ضريب توان ورودي قابل تنظيم را ندارد. به علاوه،به دليل تماميت و يكپارچگي زياد، توپولوژي مبدل ماتريسي براي دماهاي بسيار بالا و كاربردهاي بحراني وزن / حجمي توصيه ميشود. طرح و مدل كنترل مستقيم گشتاور (DTC) براي درايوهاي مبدل ماتريسي در ابتدا ارائه و توليد بردارهاي ولتاژ مورد نياز براي تكميل و پياده سازي DTC موتورهاي القايي تحت محدوديت ضريب توان ورودي واحد فراهم و ميسر شده است. هرچند طرح DTC با استفاده از جدول سوئيچينگ داراي نواقص مخربي است. فركانس سوئيچينگ طبق سرعت موتور و نواحي پسماند مربوط به گشتاور و شار تغيير مي كند و يك ريپل بزرگ گشتاور در رنج سرعت پائين به خاطر نيروي الكتروموتوري معكوس كوچك (EMF) موتور القايي توليد مي شود.همچنین زمان نمونه برداري با كنترل بالا براي به دست آوردن عملكرد مطلوب مورد نياز است.گرچه چندين روش براي حل اين مسائل ارائه شده است ولي اين روش ها براي سيستم تحريك اينورتر معمولي طراحي شده اند. برخلاف نتايج پژوهشي براي حل اين مسائل براي تحريكهاي مبدل ماتريسي در نوشته ها مطلبی گزارش نشدهاست. براي تحقق بخشيدن كنترل بدون سنسور با عملكردبالاي تحريكهاي موتور القايي، چندين روش جالب مبني بر مشاهده گر وجود دارند كه عملكرد خوبي را در رنج بالاي سرعت ميدهند. اين الگوريتمها از مدل تحليلي موتور القايي استفاده مي كنند و تخمين هر دوي سرعت روتور و شار را از ولتاژها و جريانهاي استاتور فراهم ميآورند كه اجرا و انجام اين كارها نسبتاً ساده است. از ميان روشهاي مبني بر مشاهده گر، فيلتر توسعه يافته كالمن راه حل نهايي براي تحريك هاي بدون سنسور سرعت براي دوره خاصي ميباشد. متاسفانه اين مشاهده گر احتمالي داراي برخي معايب ذاتي همانند تاثير مشخصه نويز، بار محاسباتي، و فقدان طراحي و معيارهاي تنظيم مي باشد که اين امر منجر به بررسي مجدد اين رويكردهاي مهم شده است. بطوري كه ساختار مشاهده گر استاندارد Luenberger براي سيستم خطي طوري بهبود يافته تا برآورد همزمان سرعت و شار روتور را فراهم آورد. در طرحها و نمودارهايي توسط Kuboda و همكاران او ماتريس بهره مشاهدهگر، به سرعت غير قابل سنجش روتور وابسته است و مشاهده گر نيازمند برآورد پارامتر موتور،براي به دست آوردن عملكرد خوب بدون سنسور در رنج سرعت پائين است. كه اين كار مشاهده گر را براي كاربردهاي عملي نامناسب ميسازد. طرحهاي دیگري وجود ...
صوت در متلب
در متلب توابعی وجود دارند که به منظور کار با صوت طراحی شده اند.در این مقاله طرز کار این توابع را با هم مرور می کنیم. beep: ساده ترین دستور تولید صدا در متلب دستورbeepاست که همانطوری که از اسمش پیداست یک صدای بیپ تولید می کند.این صدا برای اجرا به هنگام تولید پیامهای اخطار در برنامه هایتان می تواند مفید باشد.می توان حالت بیپ کامپیوتر را فعال و غیر فعال کرد.به این صورت: beep on beep off اگر حالت بیپ کامپیوتر غیر فعال باشد دیگر دستورbeepتولید صدا نخواهد کرد. wavrecord: این تابع پس از فراخوانی،از یک دستگاه ورودی صدا مثلا میکروفون در زمان مشخصی تحت فرکانس تعیین شده ای صدا را ضبط می کند.توجه داشته باشید که برای ضبط صدا باید سیستم در حال ضبط باشد.برای این منظورvolume controlرا باز کنید.در ویندوزxpبه این آدرس بروید: Start/All Programs/Accessories/Entertainment/Volume control از منویOptionsگزینه یPropertiesرا انتخاب کنید.Mixer Deviceرا در یک حالتInputقرار داده و دکمه ی رادیوییRecordingرا انتخاب کنید. ساختار تابع به این صورت است: data=wavrecord(n,fs); این تابع تعدادnنمونه از یک سیگنال صوتی را تحت فرکانسfsهرتز ضبط می کند و آن را در متغیرdataذخیره می کند.مقدار پیش فرضfsبرابر 11025هرتز است.حال به تناسب زیر توجه کنید: 1secàfs Hz t secàt*fs Hz همانطور که گفته شد تابعwavrecordتعدادnفرکانس را ضبط می کند.بنابراین اگر بخواهیمtثانیه صدا ضبط کنیم بایدt*fsفرکانس را ضبط کنیم.یعنی تابع را تحت این ساختار فراخوانی کنیم: data=wavrecord(t*fs,fs); wavwrite: حال باید صدای ضبط شده را در یک فایل صوتی ذخیره کنیم.برای این منظور از تابعwavwriteاستفاده می شود.این تابع ماتریس حاوی صدای ضبط شده را در یک فایل با پسوند.wavذخیره می کند.فایل تولید شده قابل پخش در کلیه ی برنامه های پخش صداست. wavwrite(data,fs,'filename'); به متغیرfsدر ساختار تابع توجه کنید.مقدار متغیرfsدر ساختار تابعwavwriteباید با مقدار متغیرfsدر ساختار تابعwavrecordبرابر باشد.در واقع باید صدا را با همان فرکانسی که ضبط کرده ایم در فایل ذخیره کنیم.در غیر این صورت صدا زیر یا بم می شود. wavread: این تابع یک فایل صوتی با پسوند.wavرا می خواند و آن را در متغیرdataو فرکانسش را در متغیرfsذخیره می کند. [data fs]=wavread('filename'); wavplay: این تابع ماتریس حاوی صوت را تحت فرکانس مشخصی پخش می کند. wavplay(data,fs); sound: طرز کار این تابع مشابهwavplayاست. sound(data,fs); باز هم یادآور می شوم که برای پخش صدا باید فرکانس پخش با فرکانس ضبط برابر باشد.