ربات مسیریاب ساده
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیر یاب بسازیم با سلام خدمت دوستان گلم که میخوان یک روبات مسیر یاب حرفه ای بسازن برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشین در این وبلاگ سعی میشود نحوه ساخت یک ربات مسیر یاب به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود خوب بریم سر اصل مطلب که قراره در مورد مکانیک یک ربات مسیر یاب که فکر میکنم ساده ترین قسمت یک ربات مسیر یاب باشه توضیح بدیم مکانیک مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد 2- موتور ربات مسیر یاب 3- چرخ ربات مسیر یاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد خوب دیگه بسه بریم سر اصل مطلب که میخوایم یکی یکی این اجزای مکانیکی رو تجزیه و تحلیل کنیم شاسی یا بدنه این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از : DC MOTOR Steper Motor شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید یک ربات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتونستید این جور موتوری را تهیه کنید میتوانید از یک آلمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ) که من توصیه میکنم این جور موتور هایی رو از این سایت که موتور های خوبی واسه این کار داره و هم ایرانی هست هم خیلی سریع بدستدون میرسه تهیه کنید : www.Shop.Farsitools.com Is Shoping Robotic چرخ ها در ساخت این جور رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از : -1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطحکاک چرخ با زمین 1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند ...
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیریاب بسازیم : مقدمه : برای ساختن یک ربات باید آشنایی مقدماتی با 3 رشته مکانیک ، برنامه نویسی و الکترونیک آشنایی داشته باشیم . البته نیازی نیست در تمامی این رشته ها خود تسلط داشته باشیم چنانچه شما عضو یک تیم هستید هریک از اعضای تیم باید در مهارت خود تسلط داشته باشند تا شما به نتیجه دلخواه و ایده آل خود برسید . در اینجا روش ساخت یک ربات همچنین تجربیاتی را که در این زمینه کسب کرده ام در اختیار شما قرار خوا هم داد . همانطور که گفته شد بحث ما شامل سه بخش است . 1. مکانیک2. الکترونیک3. برنامه نویسی مکانیک در مکانیک یک ربات مسیر یاب چند بخش وجود دارد مکانیک ربات مسیر یاب جزء ساده ترین مکانیک ها محسوب می شود این مکانیک شامل بخش های زیر است. 1. شاسی (یا بدنه ) که تمام اجزاء روی آن قرار خواهند گرفت.٢. موتور ها٣. چرخ ها۴. برد سنسور 1. شاسی یا بدنه : اینستف بخش در ساده ترین حالت می تواند یک طلق پلاستیکی یا چوب (تخنه سه لا) باشد که نسبتا سبک بوده و استحکام خوبی دارد . برد الکترونیکی شما روی آن پیچ می شود و موتور ها وچرخ ها به آن وصل می شود و برد سنسور در جای خود قرار می گیرد . 2. موتور ها : موتور های ربات یکی از مهمترین اجزاء ربات محسوب می شوند از سه نوع موتور می توان برای ربات استفاده کرد . موتور هایی که باید در این ربات ها استفاده شوند از نوع DC Motor می باشند و مستقیماً نمی توان آنها را به چرخ وصل کرد مگر اینکه توسط گیرباکس از سرعت آنها کم شود و به قدرت آنها اضافه شود. 1. موتور های اسباب بازی ها و گیرباکس آن ها در ساده ترین حالت شما می توانید گیرباکس اسباب بازی ها را باز کرده و از آن ها استفاده کنید فقط اگر از این روش استفاده می کنید دقت کنید گیرباکس ها کاملاً روان باشند و موتور ها نیز جریان کشی بالایی نداشته باشد . اگر موتور ها جریان کشی بالایی دارند بهتر است از یک موتور دیگر استفاده کرد . ٢. گویی وپولی : روش دیگری که می توان استفاده کرد استفاده از گویی وپولی ها است که از تسمه برای وصل کردن وتبدیل دور استفاده می شود این روش هم خالی از مشکل نیست این روش توصیه نمی شود . ٣. موتور های گیرباکس دار : در این موتور ها موتور و گیرباکس داخل یک مجموعه قراردارند و در دورهای مختلف با توان های مختلف عرضه شده اند بهترین گزینه استفاده از این نوع موتور ها می باشد . چرا که یک مجموعه مطمئن است . بی صدا و حجم کمی را اشغال می کنند و معمولا جریان کشی مناسبی دارند و تنها مشکل آن ها قیمت بالای آن ها است . نکته 1 : دقت کنید موتور های معمولی را مستقیماً به چرخ وصل نکنید زیرا آن ها دارای سرعت بالا ( 2000 تا 3000 ) دور در دقیقه ولی قدرت لازم برای ...
جلسه هفدهم

سلام عرض می کنم خدمت همه هی دوستای خوبماین جلسه قراره انشاالله با هم ساخت یه ربات مسیریاب ساده (بدون میکروکنترلر) رو با هم شروع کنیم. کار را ابتدا از قسمت مکانیک شروع می کنیم، یعنی بدنهی فیزیکی ربات سيستم حركت تانكتا حالا به حرکت یک تانک جنگی دقت کرده اید؟ اگر دقت نکرده باشید هم متوجه خواهید شد که تانک، مثل خودروهای شخصی معمولی دارای سیستم فرمان نیست، یعنی برای چرخش در سر پیچ ها، چرخهای جلوی آن به سمت خاصی متمایل نمیشوند. پس تانکها چگونه حرکت میکنند؟ به شکل زیر نگاه کنید سیستم حرکتی تانک به این صورت است که در 2 طرف آن چند چرخ به وسیله ی یک تسمه ی فلزی ضخیم (به اصطلاح شنی) به یکدیگر متصل شدهاند، حرکت شنیها هر کدام جداگانه توسط رانندهی تانک کنترل میشود و راننده عمل پیچیدن تانک به هر سمت را با توقف شنی آن سمت انجام میدهد. مثلاً اگر تصمیم داشته باشد تانک به سمت چپ بپیچد، شنی سمت چپ را متوقف کرده و شنی سمت راست به حرکت خود ادامه میدهد و در نتیجه تانک حول محور مشخصی (محور همان شنی سمت چپ است) به سمت چپ میپیچد.از مهمترین مزیتهای این سیستم نسبت به سیستم خودروهای سواری، بالاتر بودن قدرت مانور آن در سر پیچها میباشد، یعنی با سیستم تانک میتوان با سرعت بیشتری پیچها را پیمود.همچنین شبیهسازی این سیستم در ابعاد کوچکتر بسیار سادهتر از سیستم خودروهای معمولیست. به همین خاطر ما در رباتها از همین سیستم به اصطلاح تانکی استفاده میکنیم، اما با یک تغيیرات جزیی. ما شنی را از سیستم حذف میکنیم، یعنی دور چرخ ها تسمه ای نمیاندازیم، زیرا این تسمه برای کاربردهای خاص طراحی شده و در ساخت یک ربات مسیریاب نیازی به آن نیست. همچنین چرخهای جلو را نیز میتوانیم حذف کرده و به جای آن در فاصلهی بین 2 چرخ هرزگرد بگذاریم. (هرزگرد یک چرخ است که به هر جهتی میتواند حرکت کند. در پایهی بعضی از مبلهای خانگی و صندلیهای کامپیوتری از هرزگرد استفاده شده است.)شکل زیر نمای کلی ربات ما است (دید از زیر) خود شاسی ربات نیز بهتر است از جنس MDF یا پلاستیک فشرده (پلکسی گلاس) باشد. برای اتصال موتورها به بدنه هم میتوانید از "دیوار کوب" لولههای آب استفاده کنید. الگوریتم تعقیب خط در یک ربات مسیریاب ربات مسیریاب ساده باید قادر باشد یک خط مشکی رنگ به پهنای تقریبی 2 سانتیمتر را در یک زمینهی سفید دنبال کند. البته در رباتهای مسیریاب حرفهای بحث خیلی پیچیدهتر شده و رباتها باید قادر باشند حتی در بخشهایی از زمین مسابقه خط سفید رنگ را در زمینهی سیاه دنبال کنند. در جلسات قبل با سنسورهای نوری فتوترنزیستور ...
طراحی یک روبات مسیر یاب ساده
یک روبات مسیر یاب آماده! روبوت دنبال کننده خط سیاه: این روبوت مدار خیلی ساده ای داره ومن اون رو با تمام فایل هایی که برای پروگرمر لازم داره براتون میذارم حتی یک اماتور هم میتونه به سادگی اون رو بسازه برای موتورها و چرخ میتونید از موتور های ساده ماشینهای اسباب بازی استفاده کنید در این روبوت دو تا چرخ عقب توسط موتور کنترل میشه ولی چرخ جلو ازاده از چهار تا سنسور هم برای تشخیص نوار سیاه استفاده شده وقتی که سنسورها نوار سیاه رو میبینن خروجی مقایسه کننده low,lm324خواهد شد و در بقیه موارد خروجی highخواهد بود در اینجا برای درایور کردن موتورها از ای سی l293dاستفاده شده که برای کنترل سرعت و جهت موتور استفاده شده اگه نتونستید این ای سی رو توی بازار پیدا کنید پیغام بذارید تا یه مدار دیگه ای که میشه جایگزین کرد رو براتون بفرستم توجه:نحوه قرارگیری سنسورها خیلی مهمه برای پروگرم کردن ۸۹۵۱احتیاج به یک پروگرمر دارید ولی فایل هگز به صورت اماده در دسترس هست امیدوارم که این روبوت رو بسازید و از ساخت اون لذت ببرید اگه در رابطه با ساخت به مشکلی بر خوردید سوال کنید من هم سعی میکنم جواب بدم از این مدار حتی میتونید به عنوان یه پروژه دانشجویی هم استفاده کنید فایلها رو با کلیک روی لینکهای زیر میتونید دریافت کنید با توجه به اینکه خیلی از دوستان راجع به این روبوت سوال داشتند من این قسمت رو ویرایش کردم تا تعدادی از سوالات رو جواب بدم: ۱.در مورد مدار چاپی باید بگم زیاد احتیاج به pcbنیست چون می تونید از برد سوراخ دار استفاده کنید و نتیجه بگیرید اگر هم خواستید می تونید با پروتل طراحی کنید ولی من pcbاین مدار رو به صورت اماده ندارم ۲.در مورد مکانیک این روبوت همونطور که گفتم می تونید از اسباب بازی استفاده کنید جهت اشنایی بیشتر با مکانیک اینگونه روبوت ها می تونید به سایت های زیر مراجعه کنید چگونه یک روبوت مسیریاب بسازیم:(ایران روباتیک) http://robotic.farsitools.com/upload/158861833_robotics.zip?PHPSESSID=3569ba0a7903ede243e14cad9164e8d8 http://www.hlachini.com/Projects/robotic/index.htm فارسی http://www.leang.com/robotics/info/articles/linesen/index.html انگلیسی ۳.در مورد مدار جایگزین ای سی هم می تونید منتظر باشید تا روبوت خودم رو اپلود کنم و از درایور اون استفاده کنید و یا از سایتهایی که در این رابطه معرفی کردم استفاده کنید robot c robot-hex robot-asm
ربات مسیریاب چیست؟
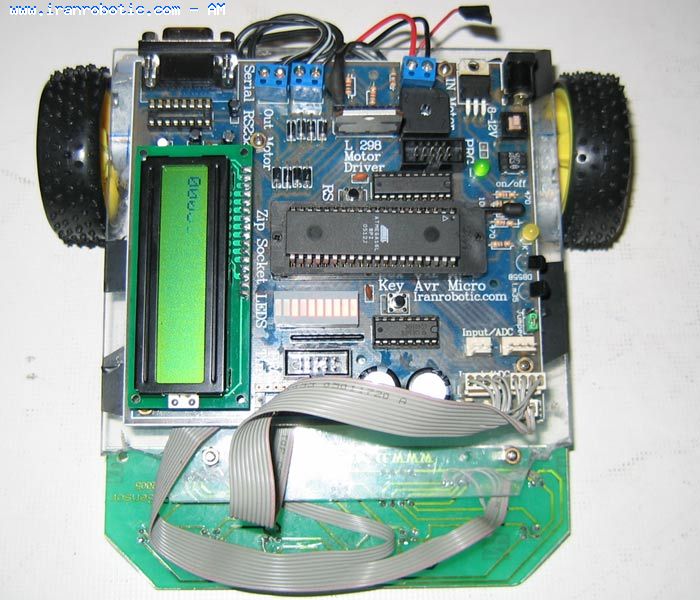
ربات مسیر یاب باید بروی یک سطح سفید که یک خط مشکی بر روی آن کشید ه شده حرکت کند و به هر کجا خط مشکی می رود ربات هم برود در این میان ممکن است بریدگیهای به عرض کوچک و یا مسیر های با زاوریه 90در جه وجود داشته باشد که ربات باید این مسیر ها را هم تشخیص داده و به مسیر خود ادامه دهد. ربات ما باید برروی مسیر فوق حرکت کند بدون اینکه از مسیر خارج شود . یک ربات معمولاً از سه بخش زیر ساخته شده است : واحد خروجی واحد پردازش و حافظه واحد ورودی از یک ربات انتظار می رود که بر اساس اطاعاتی که از واحد ورودی دریافت می کند تصمیم مناسبی راگرفته به خروجی منتقل کند . واحد ورودی : واحد وردی معمولاً از سینسورها ، میکروسویچ ها ، دوربین ها ، حس گرها و ... تشکیل یافته است که شرایط محیط مانند میزان نور ، وضعیت قرارگیری ربات ، دما و ... را با سیگنال های الکتریکی صفر و پنج ولت تبدیل می کنند و به واحد پردازش منتقل می کنند . کارکرد مناسب یک ربات به دقت سنسورهای انتخابی بستگی دارد . واحد پردازش : این واحد اطلاعات را از ورودی دریافت می کند و متناسب با نوع برنامه آن خروجی های مناسبی تولید می کند این واحد می تواند مدارات منطقی ،میکروپروسورها ، میکروکنترلرها ، کامپیوتر ها و ... باشد . واحد خروجی : این واحد که معمولاً بامکانیک يک ربات در ارتباط است شرایط لازم برای انجام کار توسط رباب را فراهم می کند . روش کار ربات مسیر یاب : واحد وردی ربات مسیر یاب از یک اصل ساده فیزیکی پیروی می کند بدین صورت که : میزان نور برگشتی از یک سطح سیاه خیلی کمتر از میزان نور برگشتی از یک سطح سفید است . در زیر ربات ساخته شده تعداد 5 عدد سنسور فتوسل بهمراه چند چراغ قرار گرفته است . ( سنسور فتوسل در مقابل تغيير نور تغییر مقاومت می دهد ) چراغهای کوچک زیر ربات به روی پیست مسابه بتابد نور بازگشتنی از کف پیست مسابقه در جا ههایی که خط مشکی وجود دارد کمتر از جاههایی است که سفید می باشند بنابر این سنسور این مقدار از نور برگشتنی را با طرز قرار گرفتن فتوسل ها ولتاژ مرجع ( پتانسیومتر pt) مطابق با مدار زیر مقایسه کرده و خروجی صفر ولت و یا پنج ولت می دهد اگر زمینه سفید باشد پنج ولت در غیر اینصورت صفر ولت . طریقه بدست آوردن ولتاژ مرجع ( تنظیم پتانسیومتر pt) خروجی مدار بالا را به یک led با یک مقاومت متصل می کنیم . سنسور رابر روی سطح سیاه قرار داده و پتانسیور متر را به آدمی به چرخش در می آوردیم تا led در مرز روشن شدن قرار بگیرد حال سنسور را از سطح سیاه بروی سطح سفید می آوریم مشاهد ه می شود که led خاموش می شود . روش با لابرای تنظیم کردن سنورها می باشد برای هر پنج سنور با لا این عمل را ...
ربات مسیریاب(شماره 3)
آموزش ساخت ربات مسیریاب سری سوم بخش سنسور ها و فرمان :این قسمت از ربات باید بتواند خط مشکی را از سفید تشخیص دهد ، بنا به نوع خط و عرض ان و نوع مسیر از سنسور ها مختلف با چیدمان مختلف استفاده میشود :سنسور ها :در ربات های مسیر یاب از سنسور ها مادون قرمز برای تشخیص مسیر استفاده میشود ، میدانید که سطح سفید نور را دفع و سطح مشکی نور را جذب میکند ، نور از led فرستنده منتشر میشود ، در صورتی که سطح سفید باشد ، نور به گیرنده میرسد و ان را یک میکند در غیر اینصورت خروجی گیرنده صفر است :معرفی دو نوع سنسور مادون قرمز خوب :اپتوکانتر CNY70 از انجا که در هر دو قطعه بالا فرستنده وگیرنده در یک پک میباشند ، جایگزاری انها در ربات بسیار ساده است ، اکنون شما باید خروجی سنسور را اندازه بگیرید ، برای اینکار دو راه دارید ، یا خروجی را به adc بدهید و ولتاژش را اندازه بگیرید ، یا ولتاژ خروجی را به سطح منطقی صفر ویک تبدیل کنید.(بوسیله op-amp) در صورتی که از روش اول استفاده میکنید op-amp را حذف نمایید .چیدمان سنسور ها :شما باید سنسور ها را بر روی یک بورد با ارایشی خاص بسته به نوع مسیر بچینید .انواع مسیر ها :1- مسیر ها تک رنگ ، چیدمان سنسور ها برای این نوع مسیر بسار ساده میباشد ، در این نوع مسیر از 3 سنسور استفاده میشود ، سنسور وسط ، وظیفه چک کردن مسیر و دو سنسور کناری وظیفه چک کردن زمینه را به عهده دارد . در صورتی که ربات از روی خط منحرف شود ، سنسور وسط خروجی خود را تغییر میدهد ، در این حالت ربات صبر میکند تا یکی از سنسور ها کناری نیز تغییر وضعیت دهد و به سمت همان گردش کند .مثلا ربات در مسیر خود مشغول حرکت هست ، در ادامه یک پیچ به سمت راست وجود دارد ، هنگامی که ربات به پیچ میرد ، به دلیل تغییر مسیر خروجی سنسور وسط تغییر میکند ، ربات به حالت اماده باش میرود ، با ادامه یافتن حرکت ، سنسور سمت راست از روی مسیر رد میشود ، در این ربات میفهمد که باید به سمت راست گردش کند .2- مسیر های دورنگ ، در این نوع مسیر تغییر رنگ در بعضی از قسمت ها وجود دارد ، مثلا در 10 سانت اول مسیر به رنگ مشکی و زمینه به رنگ سفید است ، در 10 سانت بعدی رنگ عوض میشود ، یعنی مسیر به رنگ سفید زمینه مشکی در میاید در این نوع مسیر ، از پنج سنسور استفاده میشود ، سه سنسور وظیفه کنترل کردن ربات و جلوگیری از گم کردن مسیر را به عهده دارند ، دو سنسور دیگر هم رنگ مسیر ها را کنترل میکنند ، یعنی یکی از انها رنگ زمینه و دیگری رنگ مسیر را چک میکند .شما باید در برنامه خود خروجی سنسور اول (کنترل کننده های مسیر )را با خروجی سنسور دوم (کنترل کننده های رنگ زمینه ) مقایسه کنید ، در صورتی که هر دو سنسور یک رنگ را تشخیص دهند ربات ...
ساخت ربات مسیریاب؛ ساده ترین ربات
ربات های مسیر یاب ربات مسیریاب رباتی است که می تواند در یک مسیر از قبل تعیین شده حرکت کند ، این مسیر میتواند یک خط سیاه در زمینه سفید یا یک خط سفید در زمینه سیاه باشد و یا مخلوتی از هر دو باشد. ربات باید بتواند انواع مسیرهای موجود مانند پیچ، بریدگی، خطوط زاویه دار و مهم تر از همه حلقه را در کمترین زمان ممکن طی کند. ساخت ربات های مسیر یاب کاری نسبتا ساده میباشد، برای ساخت ربات شما نیاز به دانش برنامه نویسی برای پردازنده و رباتیک برای ساخت قسمت متحرک دارید ، شما همچنین باید طریقه کار با سنسور ها را بدانید، در ادامه شما را با کلیه مراحل ساخت ربات مسیر یاب اشنا میکنیم.یک ربات مسیر یاب از بخش های کلی زیر تشکیل میشود که در ادامه هر یک را بررسی میکنیم:بدنه ربات مدار تغذیه قسمت حرکت بخش سنسور ها و فرمان پردازنده و برنامه نویسی بدنه ربات:برای بدنه ربات ، شما میتوانید از هر جسمی استفاده کنید اما این جسم باید دارای شرایط زیر باشد:- سبک باشد- محکم باشد- امکان سوار کردن اجزا روی آن وجود داشته باشد.- امکان ایجاد تغییر در شکل آن باشد.-جمع جور باشد.با توجه به مطالب بالا بهترین گزینه برای بدنه ربات پلاستیک میباشد، شما میتوانید از شاسی ماشین های اسباب بازی یا از شاسی های اماده موجود در بازار استفاده کنید . در یک ربات معمولا پردازنده و قسمت فرمان در وسط بدنه ، موتور ها در طرفین ، سنسور ها در جلو ، و باطری در عقب قرار میگیرد . همچنین کلیه اجزا توسط پیچ و مهره یا چسپ حراراتی یا .. (بهتر است از پیچ و مهره استفاده شود )محکم به بدنه چسبانده میشوند . برای حفاظت از پردازنده در مقابل نویز یک روکش فلزی روی قسمت فرمان قرار میگیرد . همچنین برای جلوگیری از دستگاری مدارات و اجزای ربات حتما برای بدنه یک روکش مناسب تهیه کنید ، بطوری که فقط چرخ ها بیرون باشد. توجه: از انجا که در هنگام حرکت، ربات لرزش خفیفی دارد ف به هیچ وجه از چسب حراراتی برای جسابندن موتور ها و سایر قطعات استفاده نکنید، در صورت استفاده از پیچ مهره حتما از مهره فنر در زیر مهره استفاده شود.مدار تغذیه :برای تغذیه ربات میتوانید از ولتاژ مستقیم منبع تغذیه DC و یا از باتری استفاده نمایید که در این قسمت طریقه استفاده از منبع تغذیه DC گفته میشوداز انجا که ولتاژ ورودی شما از یک منبع تغذیه گرفته میشود ، شما باید نصبت به صاف و رگوله بودن ان اطمینان حاصل کنید . ممکن است شما خود را برای یک مسابقه اماده کنید و در مکان مسابقه یک منبع تغذیه بدون اصل ونصب در اختیار شما قرار گیرد ، که به ازای ولتاژ 12 ولت ، 14 ولت با نوسان زیاد میدهد ، بنابرای باید خودتان دست به کار شوید و برای رباتتان یک بخش تغذیه ...
ساخت ربات مسیریاب
چگونه یک ربات مسیریاب بسازیم مقدمه :برای ساختن یک ربات باید آشنایی مقدماتی با 3 رشته مکانیک ، برنامه نویسی و الکترونیک آشنایی داشته باشیم . البته نیازی نیست در تمامی این رشته ها خود تسلط داشته باشیم چنانچه شما عضو یک تیم هستید هریک از اعضای تیم باید در مهارت خود تسلط داشته باشند تا شما به نتیجه دلخواه و ایده آل خود برسید . در اینجا روش ساخت یک ربات همچنین تجربیاتی را که در این زمینه کسب کرده ام در اختیار شما قرار خوا هم داد . همانطور که گفته شد بحث ما شامل سه بخش است . 1. مکانیک2. الکترونیک3. برنامه نویسی مکانیک در مکانیک یک ربات مسیر یاب چند بخش وجود دارد مکانیک ربات مسیر یاب جزء ساده ترین مکانیک ها محسوب می شود این مکانیک شامل بخش های زیر است. 1. شاسی (یا بدنه ) که تمام اجزاء روی آن قرار خواهند گرفت.٢. موتور ها٣. چرخ ها۴. برد سنسور 1. شاسی یا بدنه : اینستف بخش در ساده ترین حالت می تواند یک طلق پلاستیکی یا چوب (تخنه سه لا) باشد که نسبتا سبک بوده و استحکام خوبی دارد . برد الکترونیکی شما روی آن پیچ می شود و موتور ها وچرخ ها به آن وصل می شود و برد سنسور در جای خود قرار می گیرد . 2. موتور ها : موتور های ربات یکی از مهمترین اجزاء ربات محسوب می شوند از سه نوع موتور می توان برای ربات استفاده کرد . موتور هایی که باید در این ربات ها استفاده شوند از نوع DC Motor می باشند و مستقیماً نمی توان آنها را به چرخ وصل کرد مگر اینکه توسط گیرباکس از سرعت آنها کم شود و به قدرت آنها اضافه شود. 1. موتور های اسباب بازی ها و گیرباکس آن ها در ساده ترین حالت شما می توانید گیرباکس اسباب بازی ها را باز کرده و از آن ها استفاده کنید فقط اگر از این روش استفاده می کنید دقت کنید گیرباکس ها کاملاً روان باشند و موتور ها نیز جریان کشی بالایی نداشته باشد . اگر موتور ها جریان کشی بالایی دارند بهتر است از یک موتور دیگر استفاده کرد . ٢. گویی وپولی : روش دیگری که می توان استفاده کرد استفاده از گویی وپولی ها است که از تسمه برای وصل کردن وتبدیل دور استفاده می شود این روش هم خالی از مشکل نیست این روش توصیه نمی شود . ٣. موتور های گیرباکس دار : در این موتور ها موتور و گیرباکس داخل یک مجموعه قراردارند و در دورهای مختلف با توان های مختلف عرضه شده اند بهترین گزینه استفاده از این نوع موتور ها می باشد . چرا که یک مجموعه مطمئن است . بی صدا و حجم کمی را اشغال می کنند و معمولا جریان کشی مناسبی دارند و تنها مشکل آن ها قیمت بالای آن ها است . نکته 1 : دقت کنید موتور های معمولی را مستقیماً به چرخ وصل نکنید زیرا آن ها دارای سرعت بالا ( 2000 تا 3000 ) دور در دقیقه ولی قدرت لازم برای حرکت را ندارند . نکته ...