اموزش ساخت ربات های ساده
ساده ولی هوشمند | آموزش ساخت ربات ساده ولی هوشمند
خب بی وقفه برویم سراغ آموزش: نیاز های ساخت: وسایل دستی(پیچ گشتی،انبردست،سیم چین و...) IC ها مختلف(AVR ، و...) قطعات الکترونیکی(مقاومت،خازن،ترانزیستور و...) ـــــــــــــــــــــــــ ـــــــــــــــــــــــــ ـــــــ پیشنهاد من استفاده از کیت های آموزش رباتیک هستش که راحتر همراه با دفترچه و ... هستش که می تونید از لینک زیر با قیمت مناسب خریداری کنید.فروشگاه رباتیک و الکترونیک پیشنهاد من:کیت آموزشی رباتیک > ربات مقدماتی آموزش: بعد ساخت کیت برنامه نویسی رو شروع می کنید. پایه:برای شروع باید یکی از نرم افزار های AVR CodeVision و یا Bascom را داشته باشید که البته باید کامپایلر های رباتیک آن هارا دانلود کنید که زیاد کار سختی نیست. وارد بحث برنامه نویسی میشیم. اول از همه باید از Label یا Start یا یک نام مناسب استفاده کنید. مثلا: Start 1/Start Ali Label 1/Label Ali بعد از آن باید با نام قطعات استفاده شده آشنا شوید.چیزی که ما لازم داریم قطعات زیر است. چهار موتور آرمیچر IC(در کیت قرار دارد) سنسور تاچ چند LED برای زیبایی موتور را با نام Motor یا به اختصار M نشان می دهند. البته جهت های متورو هم مهم است.چپ و راست.Right و Left به اختصار R و L برای پیش روی جلو می توانیم از عدد یا کلمه استفاده کنیم.مثلا عدد 100 که آزمایش شده و کاملا مناسب است و بجای عدد می توانید از کلمه Up استفاده کنید همااند زیر: M R 100 / M R Up / M L 100 / M L Up برای پیش روی به عقب می توانید از عدد -(منفی) یا Down استفاده کنید. M R -100 / M L -100 / M R Down / M L -100 ـــــــــــــــــــــــــ ــــــ Wait:به معنای صبر در انجام عملیات تاخیر به دلخواه شما انجام می دهد.برای مثال M R 100 M L 0 Wait 2s M R 0 M L 100 بعد از Wait عدد 2 و حرف S را گذاشته ام. ثانیه:Second - S دقیقه:M - Minute ساعت:Hour-H که بعد از عدد مورد نظر کلمات خلاصه را می گذاریم مانند Wait 1s ـــــــــــــــــــــــــ ـــــــــــــــــــــــــ ــــــــــــــــــــــ سنسور تاچ: سنسور تاچ یک برنامه نویسی شرطی دارد یعنی اگر چنین اتفاقی افتاده کاری را که ما داده ایم انجام بعد.معمولا باید قبل از Touch باید از حرف iF استفاده کنیم.یعنی شرط کرده ایم. بعد از کد زیر باید جهت سنسور را تایین کنیم. مثال: iF Touch Right On می توانید خلاصه هم بنویسید مث کد های بالا: iF T R On / iF T L On ــــــــــــــــــــــــ بعد از اینکه سنسور روشن شد باید از عدد منفی(-)استفاده کنیم برای اینکه بازگردد. iF Touch Right On M R -100 M L -100 در آخر هم End iF مثال: iF touch right On M R -100 M L -100 End iF ــــــــــــــــــــــ تبریک می گویم برنامه تکمیل شد حالا شما باید آن را پروگرم کرده و اکنون ربات شما کامل شد.امیدوارم از این آموزشهم لذت کافی برده باشید و به دردتان خورده باشد.نظرت ...
ساخت روبات جنگجو

ربات های جنگجو یکی از جذاب ترین انواع ربات ها است که به علت عدم نیاز به دانش و آگاهی زیاد و با تکیه بر خلاقیت های بدیع، طرفداران زیادی دارد. اصول کلی طراحی این ربات ها بر اساس قوانین مسابقات و با تکیه بر خلاقیت هایی است که عموماً شامل طراحی مکانیکی آن می شود. و هرچه مکانیک ربات دقیق تر مورد بررسی قرار گرفته شده باشد، شانس برتری بیشتری نسبت به دیگر رقبا دارد. در این بین برای دوست داران اینگونه ربات ها، خواندن کتابی که حاوی نکات جالب و منتقل کننده تجربیات ناب باشد، بسیار ضروری به نظر می رسد. چرا که برای پیش برد ایده های ذهنی خود نیاز به ابزاری دارید که شناسایی این ابزار و راهنمایی های انجام گرفته، شما را بیش از پیش به اهدافتان نزدیک تر می کند. نوصیه ما به دوستان عزیزمان این است برای تحقق ایده های ذهنی خود، تا می توانید از مسیر علمی و با نظم از پیش طراحی شده، پیش بروید. کتاب زیر به نام Build your Own combat robot از انتشارات McGraw-Hill به چاپ رسیده و در عین حال آنکه کمی قدیمی به نظر می آید، اما از بهترین مراجع ربات های جنگجو است و حاوی نکات فراوان در طراحی و ساخت اینگونه ربات ها می باشد. دانلود فایل لینک دانلود نرم افزار شبیه سازی ربات جنگجو
آموزش ساخت ربات پرنده (کوادروتور)

بحث ربات های پرنده چند سالی است که به شدت مورد علاقه ی بسیاری از علاقه مندان به رباتیک و هوافضا قرار گرفته است. شاید دلیل این امر جذاب بودن ساختار و همچنین مأموریت های خاصی است که فقط از عهده ربات های پرنده بر می آید. به همبن دلیل برآن شدیم که جهت پاسخگویی به نیاز جمع کثیر دوستان علاقه مند به این ربات ها، سلسله آموزش های گام به گام جهت آشنایی و ساخت کوادروتور بر پایه تجربیات پیشین را در اختیار دوستان قرار دهیم.در این پست به آشنایی مقدماتی با ساختار کوادروتورها و برخی اصلاحات بکار رفته در ساخت این پروژه پرداخته شده است و انشاا… در پست های بعدی مطالب به صورت جزء و تخصصی تر ارائه خواهد شد.لطفاً با ارائه ی نظریات خود ما را در هرچه بهتر ساختن مطالب یاری فرمایید.دانلود PDF به زبان فارسی و همچنین تماشای آموزش های تصویری در ادامه مطلب. دانلود PDFلینک تماشای فیلم آموزشیجهت دانلود فیلم ها از سایت آپارات از آخرین ورژن نرم افزار (IDM(Internet Download Manager استفاده نمایید.
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیر یاب بسازیم با سلام خدمت دوستان گلم که میخوان یک روبات مسیر یاب حرفه ای بسازن برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشین در این وبلاگ سعی میشود نحوه ساخت یک ربات مسیر یاب به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود خوب بریم سر اصل مطلب که قراره در مورد مکانیک یک ربات مسیر یاب که فکر میکنم ساده ترین قسمت یک ربات مسیر یاب باشه توضیح بدیم مکانیک مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد 2- موتور ربات مسیر یاب 3- چرخ ربات مسیر یاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد خوب دیگه بسه بریم سر اصل مطلب که میخوایم یکی یکی این اجزای مکانیکی رو تجزیه و تحلیل کنیم شاسی یا بدنه این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از : DC MOTOR Steper Motor شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید یک ربات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتونستید این جور موتوری را تهیه کنید میتوانید از یک آلمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ) که من توصیه میکنم این جور موتور هایی رو از این سایت که موتور های خوبی واسه این کار داره و هم ایرانی هست هم خیلی سریع بدستدون میرسه تهیه کنید : www.Shop.Farsitools.com Is Shoping Robotic چرخ ها در ساخت این جور رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از : -1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطحکاک چرخ با زمین 1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند ...
آموزش ساخت روبات(جلسه2)
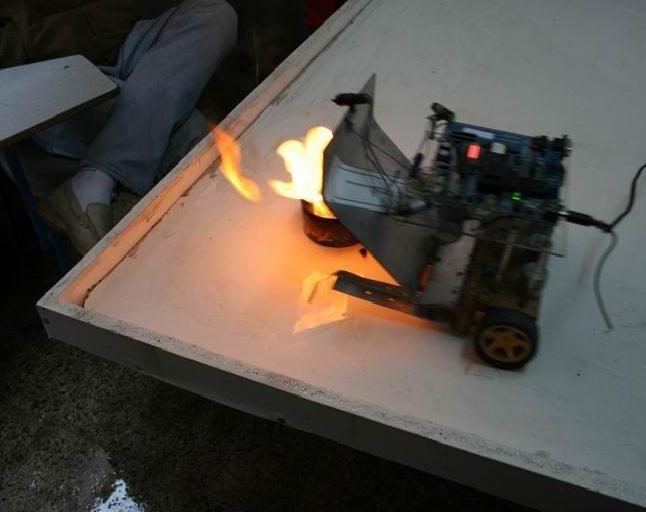
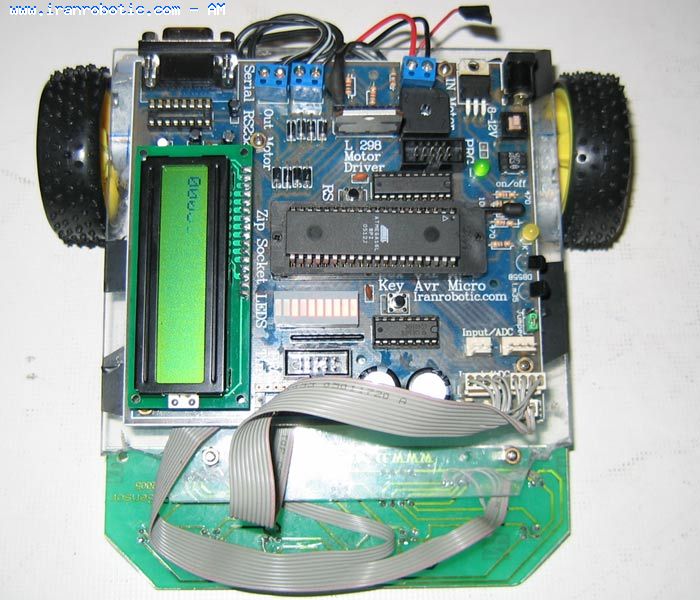
خوب ، وقت این رسیده که ببینیم این مطالبی که تا حالا کم و بیش یاد گرفتیم چه ارتباطی با کار ما داره، آیا این مطالبی که یاد گرفتیم همشون ضروری و مهم بودند ؟ از این به بعد چه چیزایی یاد می گیریم؟ و در نهایت قراره بعد از اموختن این مطالب به کجا برسیم؟ ما میخواهیم در ادامه یک دید کلی از یک ربات داشته باشیم تا متوجه بشویم که مطالبی که الآن ارایه می شوند، هر کدام در چه بخش هایی کاربرد دارند. شاید اولین سوالی که باید جواب داده بشه این هستش که ما می خواهیم در نهایت چه رباتی بسازیم؟ : ما قصد داریم به لطف خدا یک ربات آتش نشان را در پایان این دوره ها طراحی کرده و بسازیم. پس بد نیست ساختار یک ربات آتش نشان ساده رو با هم بررسی کنیم. در حالت کلی یک ربات شامل 3 بخش زیر می باشد: 1- ورودی ها: شامل همه ی سنسورهای مختلف ربات که اطلاعات محیط رو اعم از میزان نور، میزان گازهای مختلف، درجه حرارت محیط و.... دریافت و در در اختیار بخش پردازش گر ربات قرار می دهند 2- پردازش گر: اطلاعات ورودی ربات را دریافت و توسط مدارهای کنترلی(اعم از میکرو کنترولرها و مدارهای الکترونیکی دیگر) آنرا پردازش و تصمیم گیری می کند و تصمیمات رو در اختیار بخش های اجرایی ربات قرار می دهد. 3- خروجی ها(بخش های اجرایی): شامل موتورها، پمپ آب، LEDهای هشدار دهنده، آژیر خطر و... ابتدا ربات به وسیله ی سنسورهای نوری(نوعی مقاومت نوری) و بخش پردازشگر ابتدا مکان آتش را بر روی زمین مشابقه پیدا می کند. الگوریتم پیدا کردن آتش:(الگوریتم در اینجا به معنای راهکار حل مسآله می باشد) همان طور که میدونید یکی از مهمترین مشخصات آتش تابش نور و گرمای زیاد می باشد. مقاومت های نوری هم هر زمانی که نور بیشتری از محیط دریافت کنند مقاومت آنها کمتر می شود(در اینجا از مقاومت نوری به عنوان حسگر نور استفاده کردیم). ربات برای پیدا کردن آتش در ابتدا به صورت ثابت به دور خود می چرخد. یک مقاومت نوری نیز در جلوی ربات قرار دارد . هنگامیکه جلوی ربات در حین چرخش در مقابل آتش قرار بگیرد، نوری که به مقاومت نوری میرسد افزایش یافته و مقاومت آن کاهش می یابد. در نتیجه ربات توسط بخش پردازشگر وجود آتش را تشخیص می دهد. بخش پردازشگر دستور توقفِ چرخش و حرکت به سوی آتش را صادر می کند. این دستور توسط مدارهای واسط(در اینجا منظور مدارهایست که برای تقویت و کنترل جریان طراحی می شوند) به موتورها منتقل و اجرا می شود و ربات به سوی آتش حرکت می کند. الگوریتم خاموش کردن آتش: ربات در حال حرکت به سوی آتش می باشد،پس باید در یک فاصله ی مناسب از آتش که در آن فاصله به ربات اسیب نرسد بایستد و پمپ آب روشن کرده و آتش ...
دانلود کتاب "آموزش ساخت ربات ساده"

نام کتاب: آموزش ساخت ربات سادهنویسنده: ا.بمنبع: مرجع دانلود کتابتعداد صفحات: ۱۵ صفحهحجم فایل: ۴۷۰ کیلوبایتفرمت کتاب: پی دی افتوضیح مختصر: در این کتاب به صورت تصویری و گام به گام با نحوه ساخت یک ربات ساده در ۱۵ مرحله بدون نیاز به برنامه نویسی آشنا می شوید. رمز فایل زیپ: bia2pdfbooks فرمت فایل: zipکلید واژه: دانلود کتاب جالب و زیبای ساخت یک ربات ساده در طی ۱۵ مرحله بدون نیاز به برنامه نویسی - دانلود کتاب های خلاقیت و نوآوری - مرجع دانلود کتاب های علمی به صورت پی دی اف - چگونه یک ربات بسازیم؟
آموزش ساده الکترونیک به دوستداران الکترونیک و حتی کسانی که از الکترونیک نمی دانند
شما در این کتاب می توانید الکترونیک را از صفر شروع کرده و حرفه ای شوید دانلود فایل pdf اموزش الكترونيك دانلود فایل دانلودنرم افزار اندرويدي "amozesh_electronic" دانلود فایل
كتابهاي آموزشي ساخت ربات

دانلود کتاب آموزش ساخت ربات ساده نام کتاب : آموزش ساخت ربات ساده نویسنده : احمد رستمی ناشر : پارس بوک زبان کتاب : پارسی تعداد صفحه : 36 قالب کتاب : PDF حجم فایل : 650 Kb توضیحات : هر ریات از سه بخش مکانیک ، الکترونیک و کامپیوتر تشکیل شده است. ساده ترین ربات ، رباتی است که بتواند مسیری را که برنامه نویس در برنامه مشخص کرده بپیماید. ربات پیشرفته تر ، خودش تشخیص مسیر داده و بالطبع برنامه آن پیچیده تر و مدارات و قطعات الکترونیکی و مکانیکی آن گسترده تر خواهند شد. ادامه مطلب و دانلود این کتاب دانلود کتاب مکاترونیک و رباتیک نام کتاب : مکاترونیک و رباتیک نویسنده : مرتضی هومان فرد، محمد جواد فتوحی ناشر : پارس بوک زبان کتاب: پارسی تعداد صفحه : 110 قالب کتاب : PDF حجم فایل : 5,164 Kb توضیحات : کتابی فوق العاده کاملی که برای شما آماده شده است یکی از ناب ترین و کمیاب ترین کتاب های آموزش ساخت ربات است که توسط جناب آقای فتوحی و هومان فرد آماده شده است . این کتاب از اولین قدم های ساخت ربات تا خیلی از نکات عملی و نرم افزار های مورد نیاز از جمله کدویژن را بصورت تخصصی آموزش داده است . کل کتاب در ۱۱۰ صفحه تایپ شده به همراه عکس های بسیار واضح می باشد . این کتاب در خیلی از آموزشگاه ها تدریس می شود . کتاب مکاترونیک و رباتیک از چهار بخش کلی تشکیل شده است : - آشنایی با مسابقات رباتیک :ربات های جنگجو ، فوتبالیست ، مین یاب ، تعقیب خط ، میکروماوس - مکانیک ربات :موتور های DC ،منابع تغذیه ، موتور های پله ای ، انواع چرخ ها - الکترونیک ربات :منابع جریان ، مقاوت ها ، خازن ها ، سوئیچ ها ، دیود ،ترانزیستور ، سنسور ها ، آپ امپ - برنامه نویسی ربات :میکرو کنترلر ها ، برنامه نویسی با کدویژن ، مثال های متعدد زبان C ادامه مطلب و دانلود این کتاب دانلود کتاب آموزش طراحی الکترونیکی یک روبات مسیریاب نام کتاب : طراحی الکترونیکی یک روبات مسیریاب نویسنده : رامین عالمیان ناشر : پارس بوک زبان کتاب : فارسی تعداد صفحه : ۴۱ قالب کتاب : PDF حجم فایل : ۷۶۹ Kb توضیحات : در اینجا ما شما را با انواع ربات ها از قبیل ساده و پیچیده و ربات هایی که دارای حسگر هستند آشنا می کنیم و خواهیم گفت که ربات ها توسط ریزپردازشگرها و ریزکنترل گرها کنترل می شوند. همچنین ویژگی های ربات مسیر یاب و نحوه پیاده سازی نرم افزاری و سخت افزاری این ربات را مورد بررسی قرار داده ایم. ادامه مطلب و دانلود این کتاب دانلود ...