اموزش ساخت ربات مسیر یاب
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیر یاب بسازیم با سلام خدمت دوستان گلم که میخوان یک روبات مسیر یاب حرفه ای بسازن برای ساخت یک ربات مسیر یاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشین در این وبلاگ سعی میشود نحوه ساخت یک ربات مسیر یاب به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود خوب بریم سر اصل مطلب که قراره در مورد مکانیک یک ربات مسیر یاب که فکر میکنم ساده ترین قسمت یک ربات مسیر یاب باشه توضیح بدیم مکانیک مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به برسی هر کدام می پردازیم 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد 2- موتور ربات مسیر یاب 3- چرخ ربات مسیر یاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات میباشد خوب دیگه بسه بریم سر اصل مطلب که میخوایم یکی یکی این اجزای مکانیکی رو تجزیه و تحلیل کنیم شاسی یا بدنه این قسمت از مکانیک ربات مسیر یاب که وظیفه نگه داری تمام اجزا و مدار ها بر روی خود میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتا سبک باشد و بتواند این اجزا را تحمل کند موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از : DC MOTOR Steper Motor شما برای یک ربات مسیر یاب به دو موتور خوب نیاز دارید که یکی برای چرخش به راست و دیگری برای چرخش به چپ که توصیه میشود این موتور ها رو در عقب ربات نصب کنید یک ربات باید از موتوری ( المیچر ) ی استفاده کند که داری قدرت بالا ( جریان کشی ) و دور مناسب باشد که ربات بتواند آن را کنترل کند و از دور خارج نشود و اگر نتونستید این جور موتوری را تهیه کنید میتوانید از یک آلمیچر اسباب استفاده کنید به شرطی یک عدد گیر باکس بر سر راه آن بزارید که از سرعت آن بکاهد و قدرت آن بیشتر شود : ( سرعت موتور های اسباب بازی زیاد و قدرت آنها کم میباشد ) که من توصیه میکنم این جور موتور هایی رو از این سایت که موتور های خوبی واسه این کار داره و هم ایرانی هست هم خیلی سریع بدستدون میرسه تهیه کنید : www.Shop.Farsitools.com Is Shoping Robotic چرخ ها در ساخت این جور رباتی باید به چند نکته در مورد چرخ ها توجه کرد که عبارتند از : -1 اندازه قطر چرخ , -2 اندازه عرض چرخ ,-3 اصطحکاک چرخ با زمین 1- اندازه قطر یک چرخ باید به اندازه ای باشد که با دور موتور شما هماهنگی داشته باشد چون هرچه قطر چرخ بشتر باشد با یک دور موتور روبات مسیربیشتری را طی میکند و هر چه قطر آن کمتر باشد با یک دور چرخش موتور ربات مسیر کمتری را طی میکند ...
آموزش ساخت روبات مسیر یاب
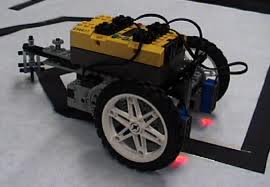
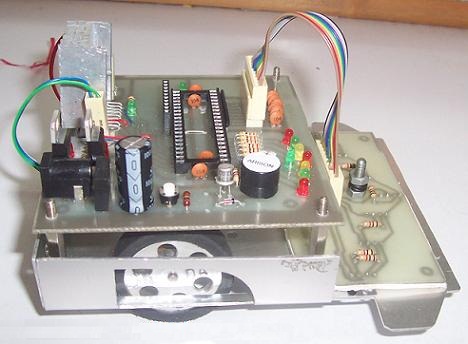
مقدمه برای ساخت یک ربات مسیریاب باید با سه رشته مکانیک , الکترونیک , کامپیوتر ( برنامه نویسی ) آشنایی مقدماتی داشته باشیم. در این پروژه سعی میشود نحوه ساخت یک ربات مسیر یاب تشخيص رنگ به طور جامع و کامل همراه با نقشه عملی مدارات آن توضیح داده شود. ابتدا در مورد مکانیک یک ربات مسیریاب که معمولاً ساده ترین قسمت یک ربات مسیر یاب باشد توضیح داده ميشود. بخش دوم در مورد كليات قسمت الكترونيك و تشريح همهي المانهاي آن به طور كامل شرح داده شده است.در بخش سوم سعي شده است كه در مورد برنامهنويسي ربات به طور مختصر توضيح داده شود. در اين بخش در مورد دستورات برنامه مربوط به بخش مسيريابي و تشخيص رنگ توضيح مختصري داده شده است. بخش اول مكانيك ربات مكانيك ربات روبات شامل دو موتور در طرفين خود است که براي حرکت به جلو، بايد هر دو موتور روشن باشد. زمان دور زدن به چپ، موتور سمت چپ خاموش و موتور سمت راست روشن است و براي دور زدن به سمت راست، موتور سمت راست خاموش و موتور سمت چپ روشن ميشود. البته موتورهاي بکار رفته، DC موتور بوده و جهت کاهش سرعت و در نتيجه کنترل دقيق تر روبات از موتورهايي با گيربکس سرخود استفاده شده، که قيمت آن در بازار جمهوري تهران 7000 تومان است در صورتي که به اين نوع موتور دسترسي نداريد ميتوانيد از موتورهاي اسباب بازي گيربکس دار استفاده کنيد، در غير اين صورت بايستي خودتان گيربکس را بسازيد دقت داشته باشيد که دورنهايي چرخش چرخهاي روبات 60 دور بر دقيقه باشد. مکانیک یک ربات مسیر یاب از 4 بخش تشکیل شده است که به بررسی هر کدام می پردازیم: 1- شاسی یا بدنه که تمام اجزای ربات مانند برد ها و ... روی آن قرار میگیرد. 2- موتور ربات مسیریاب 3- چرخ ربات مسیریاب 4- برد سنسور که وظیفه تشخیص خط زیر ربات را بر عهده دارد. * حال بايد به بررسي كامل قسمتهاي مكانيك ربات بپردازيم. 1-1 شاسی یا بدنه ربات این قسمت از مکانیک ربات مسیریاب وظیفه نگهداری تمام اجزا و مدارها را بر روی خود دارا میباشد که اجزای ربات بر روی آن بسته میشوند و میتواند یک طلق پلاستیکی یا یک تکه چوب یا یک چیزی که نسبتاً سبک باشد و بتواند این اجزا را تحمل کند. در اينجا از يك فيبر مدار چاپي استفاده شده است زيرا داراي زيبايي و سبكي بيشتري نسبت به موارد ديگر است. 1-2 موتور یک ربات مسیریاب یک ربات میتواند از دو نوع موتور استفاده کند که عبارت است از: 1- DC MOTOR 2- Steper Motor برای یک ربات مسیریاب به دو موتور خوب نیاز ميباشد که یکی برای چرخش به راست و دیگری برای چرخش به چپ. این موتور ها برا ي اينكه در پيچهاي ناگهاني و مسيرهاي پرپيچ وخم به راحتي بتواند دور ...
آموزش ساخت ربات مسیر یاب
چگونه یک ربات مسیریاب بسازیم : مقدمه : برای ساختن یک ربات باید آشنایی مقدماتی با 3 رشته مکانیک ، برنامه نویسی و الکترونیک آشنایی داشته باشیم . البته نیازی نیست در تمامی این رشته ها خود تسلط داشته باشیم چنانچه شما عضو یک تیم هستید هریک از اعضای تیم باید در مهارت خود تسلط داشته باشند تا شما به نتیجه دلخواه و ایده آل خود برسید . در اینجا روش ساخت یک ربات همچنین تجربیاتی را که در این زمینه کسب کرده ام در اختیار شما قرار خوا هم داد . همانطور که گفته شد بحث ما شامل سه بخش است . 1. مکانیک2. الکترونیک3. برنامه نویسی مکانیک در مکانیک یک ربات مسیر یاب چند بخش وجود دارد مکانیک ربات مسیر یاب جزء ساده ترین مکانیک ها محسوب می شود این مکانیک شامل بخش های زیر است. 1. شاسی (یا بدنه ) که تمام اجزاء روی آن قرار خواهند گرفت.٢. موتور ها٣. چرخ ها۴. برد سنسور 1. شاسی یا بدنه : اینستف بخش در ساده ترین حالت می تواند یک طلق پلاستیکی یا چوب (تخنه سه لا) باشد که نسبتا سبک بوده و استحکام خوبی دارد . برد الکترونیکی شما روی آن پیچ می شود و موتور ها وچرخ ها به آن وصل می شود و برد سنسور در جای خود قرار می گیرد . 2. موتور ها : موتور های ربات یکی از مهمترین اجزاء ربات محسوب می شوند از سه نوع موتور می توان برای ربات استفاده کرد . موتور هایی که باید در این ربات ها استفاده شوند از نوع DC Motor می باشند و مستقیماً نمی توان آنها را به چرخ وصل کرد مگر اینکه توسط گیرباکس از سرعت آنها کم شود و به قدرت آنها اضافه شود. 1. موتور های اسباب بازی ها و گیرباکس آن ها در ساده ترین حالت شما می توانید گیرباکس اسباب بازی ها را باز کرده و از آن ها استفاده کنید فقط اگر از این روش استفاده می کنید دقت کنید گیرباکس ها کاملاً روان باشند و موتور ها نیز جریان کشی بالایی نداشته باشد . اگر موتور ها جریان کشی بالایی دارند بهتر است از یک موتور دیگر استفاده کرد . ٢. گویی وپولی : روش دیگری که می توان استفاده کرد استفاده از گویی وپولی ها است که از تسمه برای وصل کردن وتبدیل دور استفاده می شود این روش هم خالی از مشکل نیست این روش توصیه نمی شود . ٣. موتور های گیرباکس دار : در این موتور ها موتور و گیرباکس داخل یک مجموعه قراردارند و در دورهای مختلف با توان های مختلف عرضه شده اند بهترین گزینه استفاده از این نوع موتور ها می باشد . چرا که یک مجموعه مطمئن است . بی صدا و حجم کمی را اشغال می کنند و معمولا جریان کشی مناسبی دارند و تنها مشکل آن ها قیمت بالای آن ها است . نکته 1 : دقت کنید موتور های معمولی را مستقیماً به چرخ وصل نکنید زیرا آن ها دارای سرعت بالا ( 2000 تا 3000 ) دور در دقیقه ولی قدرت لازم برای ...
اموزش ساخت روبات مسیر یاب
ساخت ربات های مسیر یاب کاری نسبتا ساده میباشد ، برای ساخت ربات شما نیاز به دانش برنامه نویسی برای پردازنده و رباتیک برای ساخت قسمت متحرک دارید ، شما همچنین باید طریقه کار با سنسور ها را بدانید ،یک ربات مسیر یاب از بخش های کلی زیر تشکیل میشود که هر یک را معرفی میکنم :بدنه ربات مدار تغذیه قسمت حرکت بخش سنسور ها و فرمان پردازنده و برنامه نویسیبدنه ربات:برای بدنه ربات ، شما میتوانید از هر جسمی استفاده کنید اما این جسم باید دارای شرایط زیر باشد:- سبک باشد- محکم باشد- امکان سوار کردن اجزا روی ان وجود داشته باشد.- امکان ایجاد تغیر در شکل ان باشد .-جمع جور باشد.با توجه به مطالب بالا بهترین گزینه برای بدنه ربات پلاستیک میباشد ، شما میتوانید از شاسی ماشین های اسباب بازی یا از شاسی های اماده موجود در بازار استفاده کنید . در یک ربات معمولا پردازنده و قسمت فرمان در وسط بدنه ، موتور ها در طرفین ، سنسور ها در جلو ، و باطری در عقب قرار میگیرد . همچنین کلیه اجزا توسط پیچ و مهره یا چسپ حراراتی یا .. (بهتر است از پیچ و مهره استفاده شود )محکم به بدنه چسبانده میشوند . برای جلوگیری از دستگاری مدارات و اجزای ربات حتما برای بدنه یک روکش مناسب تهیه کنید ، بطوری که فقط چرخ ها بیرون باشد و بس .مدار تغذیه :برای تغذیه ربات میتوانید از ولتاژ مستقیم منبع تغذیه DC و یا از باطری استفاده کنید.از انجا که ولتاژ ورودی شما از یک منبع تغذیه گرفته میشود ، شما باید نسبت به صاف و رگوله بودن ان اطمینان حاصل کنید . ممکن است شما خود را برای یک مسابقه اماده کنید و در مکان مسابقه یک منبع تغذیه بدون اصل ونصب در اختیار شما قرار گیرد ، که به ازای ولتاژ 12 ولت ، 14 ولت با نوسان زیاد میدهد ، بنابرای باید خودتان دست به کار شوید و برای رباتتان یک بخش تغذیه مجزا بسازید . معمولا ولتاژ تغذیه موتور ها 12 ولت و ولتاژ تغذیه پردازنده و سنسور ها و ... 5 ولت میباشد . شما میتوانید از یک رگولاتور 5 ولت استفاده کنید.توجه >>>>>برای اینکه ربات خود را در برابر ولتاژ معکوس (برعکس بودن پلاریته ی ورودی ) حفظ کنید میتوانید از یک پل دیود در ورودی استفاده نمایید .(هنوز وقت نکردم مدارشو بکشم اخه نرم افزار پروتوسم گم شده!!!ولی سعی میکنم در اسرع وقت واستون بیارم.)بهتره که بعد پل یکسو یه خازن ۱۰۰۰میکرو فاراد ،و بعد از خروجی رگولاتور ۷۸۰۵ ده خازن ۱۰۰ میکرو فاراد بزارین. بعد از تکمیل برد تغذیه نوبت درایو کردن موتوراس،که درایور ال ۲۹۸ پیشنهاد میدم که ۱۵ پایه داره ۱،۱۵،۸ متصل به منفی مدار ۲،۳ ۱۳،۱۴ متصل به موتور۱و۲ ۵،۷،۱۰،۱۲ متصل به میکرو کنترلر(بی ۰،بی۱،بی۲،بی۳) ۴ متصل به۱۲ ولت ۹،۱۱ ...
اموزش ساخت ربات مسیریاب
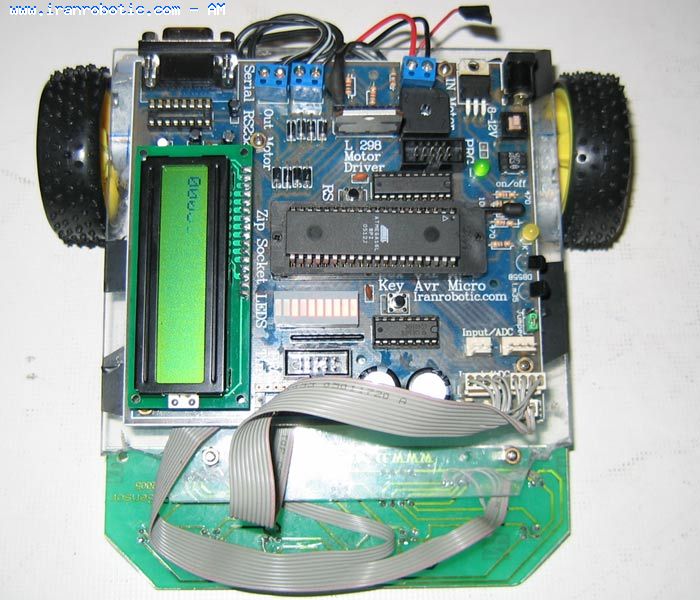
اموزش ساخت ربات مسیریاب 8 سنسور ربات مسیریاب چیست؟ نوعي از ربات است كه وظيفه اصلي آن تعقيب كردن مسيري به رنگ مثلا سياه در زمينهاي به رنگ متفاوت مشخصي مثلا سفيد است. يكي از كاربردهاي عمده اين ربات، حملونقل وسايل و كالاهاي مختلف در كارخانجات، بيمارستانها، فروشگاهها، كتابخانهها و … ميباشد. در این مقاله اموزش ساخت ربات مسیر یاب 8 سنسور اموزش داده میشود. با استفاده از این مقاله حتی کسانی که تجربه ساخت ربات مسیریاب ندارند و اطلاعات زیادی درباره ی ان ندارند میتوانند به راحتی برای خود ربات مسیریاب حرفه ای بسازند . همچنین کسانی که ربات مسیریاب ساخته اند با استفاده از نکاتی که در این مقاله گفته شده است میتوانند عملکرد ربات مسیریاب خود را بهبود بخشند . با استفاده از این مقاله میتوانید با توجه به راهنمایی هایی که برای انتخاب موتور ربات مسیریاب شده است, موتور مناسب را انتخاب کنید . در بخش دیگر توضیحات قسمت الکترونیک ربات مسیریاب قرار داده شده است که شامل برد اصلی ربات و برد سنسورها میشود و مدارات لازم با توضیحات و نکات کامل قرار داده شده است. بخش دیگر در رابطه با برنامه نویسی ربات مسیریاب میباشد که برنامه به زبان c ( کدویژن) با توضیحات کامل قرار داده شده است , در برنامه نویسی سعی شده که از دستورات ساده استفاده شود که کسانی که با برنامه نویسی اشنایی ندارند و یا اینکه به زبان c تسلط ندارند با توجه به توضیحاتی که درباره برنامه قرار داده شده است به راحتی متوجه ان میشوند . همچنین سورس و هگز برنامه و شبیح سازی پروتئوس و تصاویر لازم قرار داده شده است که به راحتی با توجه به توضیحات و فایل های قرار داده شده میتوانید یک ربات مسیریاب حرفه ای بسازید . شما میتوانید این فایل را با پرداخت مبلغ 3500 تومان دانلود کنید. این فایل را میتوانید با تخفیف 20% دانلود کنید . مدت این تخفیف محدود است . قیمت این مجموعه با در نظر گرفتن تخفیف 2800 تومان میباشد . برای پرداخت توسط پرداخت انلاین بانک ملت و دانلود اینجا کلیک کنید
ربات مسیر یاب
آموزش ساخت ربات مسیر یاب توسط مجتبی باغبانزادهamozeshe sakht robat.zip