خرید کوادروتور
فروش کوادروتور
کوادروتور در ابعاد کوچک و بزرگ دارای مانت دوربین و ارسال تصویر همزمان و جی پی اس . ساخته شده از مرغوبترین اجناس. از 2 ملیون تومان تا 20 میلیون تومانخرید
آموزش ساخت ربات پرنده (کوادروتور)

بحث ربات های پرنده چند سالی است که به شدت مورد علاقه ی بسیاری از علاقه مندان به رباتیک و هوافضا قرار گرفته است. شاید دلیل این امر جذاب بودن ساختار و همچنین مأموریت های خاصی است که فقط از عهده ربات های پرنده بر می آید. به همبن دلیل برآن شدیم که جهت پاسخگویی به نیاز جمع کثیر دوستان علاقه مند به این ربات ها، سلسله آموزش های گام به گام جهت آشنایی و ساخت کوادروتور بر پایه تجربیات پیشین را در اختیار دوستان قرار دهیم.در این پست به آشنایی مقدماتی با ساختار کوادروتورها و برخی اصلاحات بکار رفته در ساخت این پروژه پرداخته شده است و انشاا… در پست های بعدی مطالب به صورت جزء و تخصصی تر ارائه خواهد شد.لطفاً با ارائه ی نظریات خود ما را در هرچه بهتر ساختن مطالب یاری فرمایید.دانلود PDF به زبان فارسی و همچنین تماشای آموزش های تصویری در ادامه مطلب. دانلود PDFلینک تماشای فیلم آموزشیجهت دانلود فیلم ها از سایت آپارات از آخرین ورژن نرم افزار (IDM(Internet Download Manager استفاده نمایید.
نحوه ثبتنام در رشتههای بدون کنکور
مشاور عالی سازمان سنجش به مهمترین نکات در خصوص ثبت نام کنکوریهای دانشگاه آزاد برای آزمون 92 اشاره و تاکید کرد که نام نویسی کنکوریهای دانشگاه آزاد همانند داوطلبان آزمون سراسری سنجش صورت می گیرد.حسین توکلی در گفتگو با مهر، پس از تجمیع آزمونهای سراسری و دانشگاه آزاد برای سال 92 به برخی شرایط و ضوابط همچنین تاریخهای مهمی اشاره کرد که در فرایند ثبت نام داوطلبان دانشگاه آزاد در سامانه سازمان سنجش اهمیت دارد.نحوه ثبت نام در رشتههای بدون آزمون مشاور عالی سازمان سنجش درباره برخی جزئیات نحوه ثبت نام در پذیرش رشته های بدون کنکور دانشگاه آزاد، گفت: دانشگاه آزاد از طریق سامانه مرکز آزمون و سازمان سنجش توسط سامانه سنجش در دی ماه سال جاری دفترچه راهنمای کدرشته محلهای تحصیلی بدون آزمون را منتشر می کند.وی گفت: گزینش در کدرشته محلهای بدون کنکور، هر سال در مهرماه و بهمن ماه صورت می گیرد و دفترچه های راهنمای ثبت نام در مرداد و دی ماه همان سال برای ثبت نام و راهنمای داوطلبان شرکت کننده در مرحله بدون آزمون، منتشر می شود.توکلی در پاسخ به پرسش مهر در خصوص تعیین تکلیف تفکیک رشته های بدون آزمون و با آزمون برای داوطلبان، گفت: داوطلبان حتماً در مرحله ثبت نام با آزمون شرکت کنند و پس از اعلام اسامی رشته های بدون آزمون می توانند در مرحله بدون آزمون نیز شرکت کنند.ضوابط ثبت نام دانشگاه آزادیها در کنکور سنجشتوکلی در خصوص داوطلبانی که علاقمند هستند در پذیرش با آزمون رشته های دانشگاه آزاد شرکت کنند، اظهار داشت: این داوطلبان تا شنبه 25 آذرماه می توانند همانند سایر داوطلبان آزمون سراسری سازمان سنجش به سامانه این سازمان به نشانی www.sanjesh.org مراجعه و با خرید کارت اعتباری از دفاتر پست، دستگاههای خودپرداز بانک صادرات یا توسط کارتهای شتاب و مراجعه به سامانه سازمان سنجش نسبت به خرید کارت اعتباری برای آغاز ثبت نام اقدام کنند.به گفته این مقام مسئول در سازمان سنجش، روند ثبت نام داوطلبان دانشگاه آزاد هیچ تفاوتی با سایر داوطلبان شرکت کننده در آزمون سراسری ندارد و تنها در زمان مقتضی کدرشته محلهای دانشگاه آزاد و کنکور سراسری برای انتخاب رشته و پذیرش در این دانشگاهها از سوی سازمان سنجش اعلام خواهد شد.وی تاکید کرد که پس از اعلام کدرشته ها، داوطلبان می توانند دانشگاه آزاد و سایر دانشگاههای دولتی و غیردولتی را هم انتخاب کنند.وی اظهار داشت: داوطلبان علاقهمند به انتخاب کد رشته محلهای با آزمون دانشگاه آزاد اسلامی لازم است که در آزمون سراسری سال 1392 ثبت نام کنند و به همین منظور این داوطلبان می توانند از امروز دوشنبه 20/9/1391 لغایت ...
ربات پرنده قسمت2
سلام امروز میخوام به چگونگی مکانیزم و نحوه حرکت کوادروتور بپردازم کوادرتور از چهار ملخ که دو به دو بر خلاف جهت هم میگردند تشکیل شده است. یعنی به این صورت که دو ملخ روبروی هم به صورت همجهت به یک سمت میچرخد و دو ملخ روبروی دیگر که باز روبروی هم قرار دارند به صورت همجهت بوده و در خلاف جهت جفت ملخ اول میچرخد. برای درک بهتر موضوع به عکس زیر توجه کنید. اما دلیل این امر اینه که ملخها دو به دو اثر عکس العمل همدیگه رو خنثی کنند. اما نحوه کنترل حرکت کوادرتورها به صورت زیر است: برای حرکت پرنده در محور عمود باید دور جفت ملخهای یک جهت کم و به همون مقدار دور جفت ملخ جهت مخالف افزوده بشه. این کار باعث میشه بدون تغییر ارتفاع نیروی عکسالعمل یک سمت از سمت دیگه بیشتر بشه و در نتیجه پرنده در یک سمت حول محور عمودی بچرخه. اما برای حرکت پرنده حول محور عرضی و طولی لازمه بین دو ملخ همجهت یک تفاضل دور به وجود بیاریم.به این ترتیب یک سمت پرنده به سمت بالا رفته و طرف دیگر به سمت پایین میل پیدا میکند که این امر باعث کچ شدن بردار رانش و حرکت پرنده به سمتی که بازویش پایین تر است میشود و هر جه مقدار این انحراف بیشتر باشد سرعت پرنده نیز بیشتر میشود. برای تغییر ارتفاع هم فقط کافیه سرعت هر ۴ ملخ را با هم کم یا زیاد کنیم. در ادامه میخوام کمی به سخت افزار ربات بپردازم موتور:اکثر کوادروهای پیشرفته از موتورهای براشلس برای حرکت استفاده میکنند. این نوع موتور ها بسیار کوچک- سبک و پرقدرتند. دلیل این امر هم این است که بخاطر عدم وجود جاروبک یا همان زغال در این نوع موتورها هم اصتحکاک بسیار که بوده و هم میتوان توان و جریان بالایی را به موتور اعمال کرد. این موتورها به دونوع اینر و اوتر تقسیم بندی میشوند که در کوادرو ها اکثرا از نوع اوتر انهم بخاطر دور پایین استفاده میشود. البته بزودی در پستی جدا به موتورهای براشلس به صورت تخصصی تر خواهیم پرداخت. اسپید کنترل :یا همان راه انداز موتور براشلس . در موتورهای براشلس بخاطر عدم وجود جاروبک عمل کموتاسیون وتغییر قطبها و در نهایت چرخش موتور بصورت مصنوعی و توسط اسپید کنترل یا درایو موتور براشلس انجام میشود. اصول کلی کارکرد این قطعه بر اساس تولید نوسان که برق مستقیم را به صورت متناوب در میاورد نیز میباشد. در انتخاب درایو باید دقت بسیاری شود که تعداد استپهای پیشبینی شده در درایو هر چه بیشتر باشد پرنده پروازی نرمتر و پایدارتری را به نمایش خواهد گذاشت. ملخ:در انتخاب ملخ دو فاکتور از بقیه پر اهمیت تر است و از طول و گام ملخ است که معمولا به اینچ و به صورت پیوسته بروی ملخ نوشته میشود. برای مثال ملخ ۶*۸ ...
مجموعه مدارهای الکترونیکی

مجموعه مدارهای الکترونیکی این فایل که با نام مجموعه مدارهای الکترونیکی نام گذاری شده است, شامل مدارات و پروژه های الکترونیکی میباشد که بسیار کمیاب میباشند. برخی از مدارات : بیش از 10 مدار فلزیابمدار اهم متر ( پروژه کامل)مدار قفل دیجیتال گاوصندوق ( پروژه کامل با توضیحات)مدار ولتمتر 0 تا 30 ولت ( با توضیحات کامل )مدار ریموت کنترل 2 کانالهمدار ریموت کنترل 3 کانالهمدار ریموت کنترل 4 کانالهمدار فرستنده ی fm با برد 12 کیلومترمدار فرستنده ی fm با برد 5 کیلومترپروژه ربات کنترل از راه دور توسط سنسورھای مادون قرمز2 ربات مسیریابمدار رادیو دیجیتالمدار شارژر usb موبایلمدار رطوبت سنجمدار دزدگیرمدارات تایمرمدار شوکرمدار امپلی فایر قویو 10 ها مدار دیگربیشتر مدارات دارای توضیحات میباشند و برخی هم فقط مدار قرار داده شده است. شما میتوانید این مجموعه را با پرداخت مبلغ 3000 تومان دانلود کنید. این مجموعه را میتوانید با تخفیف 40% دانلود کنید . مدت این تخفیف محدود است . قیمت این مجموعه با در نظر گرفتن تخفیف 1800 تومان میباشد . حجم فایل فشرده : 7.55MB برای خرید اینجا کلیک کنید نکته1:هیچ کدام از این مدارات در سایت قرار داده نمیشود. نکته2: بعد از پرداخت توسط سیستم پرداخت انلاین بانک ملت , شما به محل دانلود هدایت میشوید . همچنین ایمیلی برای شما ( به ایمیلی که موقع خرید وارد میکنید ) ارسال میشود که حاوی لینک های دانلود میباشد . توجه کنید که لینک ها برای 48 ساعت فعال میباشند . نکته3:این مجموعه فقط برای استفاده ی شخصی میباشد . انتشار این مجموعه در اینترنت ممنوع است.
مجموعه مدارهای الکترونیکی

مجموعه مدارهای الکترونیکی این فایل که با نام مجموعه مدارهای الکترونیکی نام گذاری شده است, شامل مدارات و پروژه های الکترونیکی میباشد که بسیار کمیاب میباشند. برخی از مدارات : بیش از 10 مدار فلزیابمدار اهم متر ( پروژه کامل)مدار قفل دیجیتال گاوصندوق ( پروژه کامل با توضیحات)مدار ولتمتر 0 تا 30 ولت ( با توضیحات کامل )مدار ریموت کنترل 2 کانالهمدار ریموت کنترل 3 کانالهمدار ریموت کنترل 4 کانالهمدار فرستنده ی fm با برد 12 کیلومترمدار فرستنده ی fm با برد 5 کیلومترپروژه ربات کنترل از راه دور توسط سنسورھای مادون قرمز2 ربات مسیریابمدار رادیو دیجیتالمدار شارژر usb موبایلمدار رطوبت سنجمدار دزدگیرمدارات تایمرمدار شوکرمدار امپلی فایر قویو 10 ها مدار دیگربیشتر مدارات دارای توضیحات میباشند و برخی هم فقط مدار قرار داده شده است. شما میتوانید این مجموعه را با پرداخت مبلغ 3000 تومان دانلود کنید. این مجموعه را میتوانید با تخفیف 40% دانلود کنید . مدت این تخفیف محدود است . قیمت این مجموعه با در نظر گرفتن تخفیف 1800 تومان میباشد . حجم فایل فشرده : 7.55MB برای خرید اینجا کلیک کنید نکته1:هیچ کدام از این مدارات در سایت قرار داده نمیشود. نکته2: بعد از پرداخت توسط سیستم پرداخت انلاین بانک ملت , شما به محل دانلود هدایت میشوید . همچنین ایمیلی برای شما ( به ایمیلی که موقع خرید وارد میکنید ) ارسال میشود که حاوی لینک های دانلود میباشد . توجه کنید که لینک ها برای 48 ساعت فعال میباشند . نکته3:این مجموعه فقط برای استفاده ی شخصی میباشد . انتشار این مجموعه در اینترنت ممنوع است.
چگونه اولین ربات خود را بسازید ؟ (1)
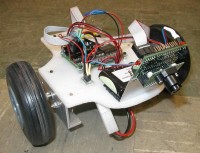
بنابراین از طرزفکر KISS استفاده کنید : (!Keep It Simple, Stupid) یعنی اولین ربات را ساده و احمقانه در نظر بگیرید ! این یک توصیه خوب برای اولین ربات است هم چنانکه در اولین ربات خود من هم کلی پول هدر دادم و رباتم هم هرگز کار نکرد . دغدغه ذهنی شما برای ساخت اولین ربات باید تنها یادگیری اصول اولیه باشد : چگونگی برنامه نویسی ؛ استفاده از ابزار ها ؛ ترمینولوژی یا فرهنگ اصطلاحات ؛ یادگیری تکنولوژی پایه ؛ تهیه قطعات ربات تا ارزان ترین حد ممکن ؛ لطفا ً ایده ناب ساخت ربات رویایی خود را برای ربات دوم خود حفظ کنید ! شما همیشه می توانید از قطعات قراضه ربات اول خود برای ربات های بعدی خود استفاده کنید . به من اعتماد کنید ! خب من آماده هستم ، چه چیزهایی برای شروع مورد نیاز است ؟ واضح است که اولین چیز پــول است . ربات ها ممکن است گران باشند . ولی یک رباتیک کار ماهر می تواند با هزینه خیلی پایین هم ربات بسازد مثلا ً 50 هزار تومان . او در تمام سال انقدر چیزهای مختلفی دور و برش جمع می کند که نیازی نباشد برای ساخت رباتش خیلی خرج کند . او همچنین میداند که چطور قطعات مختلف رباتش را با دستان خود بسازد به جای اینکه پیش ساخته آن ها را بخرد و کلی هم هزینه کند . او از خلاقیتش کمک می گیرد و خود را محدود به خریدن بسته های ربات آماده که به راحتی و با تنها مونتاژ کردن ساخته می شود نمی کند . ولی مبتدی ها اینگونه نیستند . شما می توانید بخش عمده ربات خود را از چیزهایی که در خانه دارید بسازید . اما انتظار هم نداریم اولین ربات خود را با باندهای لاستیکی و خلال دندان بسازید . به شما توصیه می کنیم برای 2 الی 3 ربات اول خود خوب خرج کنید حداقل 100 الی 200 هزار تومان برای اولین ربات هایتان . از پدر و مادر خود بخواهید اسم آن را تحصیلات ، آموزش یا هر چیز دیگری بگذارند . به آن ها بگوئید این پول را شاید بتوانید با شرکت در رقابت هایی سالم به آن ها برگردانید . به والدین خود بگوئید که این کار به انتخاب رشته و دانشگاه شما کمک خواهد کرد و به نوبه خود یک کارآموزی رباتیک است . آنها را متقاعد کنید که این کارها بهتر از خیابان گردی و تمایل به سمت مواد مخدر است . شما می توانید هزینه کارهایتان را با کمک هزینه هایی که برخی مدارس و دانشگاه ها برایتان در نظر گرفتند و حتی برخی از شرکت ها نیز تامین کنید . ربات های شما در آینده از نظر مالی برایتان مقرون به صرفه تر تمام خواهند شد چون شما هر روز ماهر تر می شوید و قطعات مفید تری را در پیرامون خود برای ساخت پیدا می کنید . اما یک چیز دیگر ، محلی برای ساختن ربات شما ؟ اگر برایتان ممکن است در یک باشگاه رباتیک عضو شوید و یا به کلاس های رباتیک بروید . شما در کنار بقیه ...
ساخت کوادکوپتر
1 . مکانیک :مکانیک کوادکوپتر ها به صورت ساده از 4 قسمت برای نصب موتورها و قسمتی برای نصب مدار الکترونیکی و قسمتی برای نصب باتری و قطعات دیگر مانند گیرنده و ... و قسمتی برای نصب دوربین که این قسمت معمولا به صورت مانت دوربین 2 محوره طراحی می گردد که از لرزش های حاصل از موتور ها و عوامل محیطی دیگر ، بر تصویر ضبط شده تاثیر نگزاردبیس اغلب فریم ها برای کوادکوپتر معمولا به صورت + می باشد و یا می توان به صورت چهار چوب به صورت # طراحی کردبهترین گزینه برای ساخت بدنه کوادکوپتر استفاده از فیبرکربن میباشد که به دلیل موجودیت کم ، از آلومینیوم و یا چوب برای بیس و برای جایگاه نصب موتور و مدار و ... از پلکسی و یا فایبرگلاس (فیبر مدار چاپی) برای این منظور استفاده می شودجزء دیگر مکانیک کوادکوپتر ها ، ملخ می باشد که دارای 2 مشخصه گام و سایز است که نسب به موتور انتخاب می شود و با دریافت کردن دیتاشیت موتور می توانید ملخ های معرفی شده برای استفاده با موتور مورد نظر را مشاهده نمایید2 . الکترونیک :مدار الکترونیکی (فلایت کنترلر) که برای کنترل موتور ها و تنظیم سرعت آنها نسبت به داده های دریافتی از سنسور ها و گیرنده رادیوکنترلر و ماژول ها و ...××× برای شروع کار می توانید از برد فلایت کنترلر سورس باز KKMulticopter استفاده کنید که به رادیوکنترلر 4 کاناله و 3 عدد جایرو برای Yaw و Pitch و Roll و قابلیت کنترل 6 موتور را دارد.سنسور ها و ماژول هایی که در فلایت کنترلر ها استفاده می شود مانند :1- جایرو : برای اندازه گیری شتاب خطی می باشد2- سنسور شتاب سنج : برای اندازه گیری شتاب زاویه ای می باشد3- GPS4- فرستنده گیرنده5- بارو متر6- میدان سنج مغناطیسی7- فاصله سنجو ...××× به دلیل هزینه بالای جایرو ، برای کمتر شدن هزینه ساخت از جایرو های موجود در دسته بازی کنسول Wii با نام Wii Monition Plus استفاده می شوداسپیدکنترلر :مارک های چینی موجود در بازار که از کیفیت خوبی نیز برخوردار است مانند TowerPro و MyStery و DualSky و HobbyWingبرای استفاده در کوادکوپتر معمولا از اسپیدکنترلر های 30 آمپر استفاده می شود که قیمت های تقریبی به صورت زیر است :1 . MyStery 30A : قیمت 33000 تومان2 . TowerPro 30A : قیمت 26000 تومان3 . HobbyWing 30A : قیمت 37000 تومانمشخصات اسپیدکنترلر ها :1 . رنج جریان های مورد نیاز برای بلند شدن پرنده از زمین از 15 آمپر به بالا شروع می شود و خیلی عادی است اگر پرنده شما در لحظاتی 30 آمپر هم مصرف نماید ساخت این مدار با این توانایی آمپر دهی چقدر هزینه دارد ؟2 . باطری یکی از قطعات گران قیمت روی پرنده است ( در بسیاری از موارد گرانترین قطعه است اگر با رنج قیمت آشنا نیستید به عنوان مثال یک باطری 3 سل با 2200 میلی آمپر ساعت و 25c در حدود 60 الی 70 ...
دیود
دیود دیود چیست ؟ دیودها جریان الکتریکی را در یک جهت از خود عبور میدهند و در جهت دیگر در مقابل عبور جریان از خود مقاومت بالایی نشان میدهند. این خاصیت آنها باعث شده بود تا در سالهای اولیه ساخت این وسیله الکترونیکی ، به آن دریچه یا Valve هم اطلاق شود. از لحاظ الکتریکی یک دیود هنگامی عبور جریان را از خود ممکن میسازد که شما با برقرار کردن ولتاژ در جهت درست (قطب مثبت پیل به آند و قطب منفی به کاتد) آنرا آماده کار کنید. مقدار ولتاژی که باعث میشود تا دیود شروع به هدایت جریان الکتریکی نماید ولتاژ آستانه یا (forward voltage drop) نامیده میشود که چیزی حدود 0.6 تا 0.7 ولت میباشد. از طرف دیگر دیود قطعهالکترونیکی است که از به هم چسباندن دو نوع ماده n و p (هر دو از یک جنس ،سیلیسیم یا ژرمانیم) ساخته میشود. چون دیود یک قطعه دو پایانه است،کریستال نیمه هادی نوع pدارای بار الکتریکی مثبت و کریستال نیمه هادی n دارای بار الکتریکی منفی می باشد . بایاس دیود : وصل کردن ولتاژ به دیود را بایاس کردن دیود می گویند . اعمال ولتاژدر دو سر پایانههایش سه حالت را پیش میآورد.دیود بی بایاس یا بدون تغذیه :که ولتاژ دو سر دیود برابر صفر است و جریان خالص بار در هر جهت برابر صفراست.بایاس مستقیم یا تغذیه مستقیم که ولتاژ دو سر دیود بزرگتر از صفر است که الکترونها را در ماده n و حفرهها را در ماده p تحت فشار قرار میدهد تا یونهای مرزی با یکدیگر ترکیب شده و عرض ناحیه تهی کاهش یابد. (بایاس مستقیم دیود)بایاس معکوس :تغذیه با بایاس معکوس که ولتاژ دو سر دیود کوچکتر از صفر است، یعنی ولتاژ به دو سر دیود طوری وصل میشود که قطب مثبت آن به ماده n و قطب منفی آن به ماده p وصل گردد و به علت کشیده شدن یونها به کناره عرض ناحیه تهی افزایش مییابد (بایاس معکوس دیود).مشخصه دیود در بایاس مستقیمفرض کنید توسط مداری بتوانیم ولتاژ دو سریک دیود را تغییر دهیم و توسط ولتمتر و آمپرمتر ولتاژ و جریان دیود را در هر لحظه اندازه گیری کرده ،بر روی محورهای مختصات رسم نماییم.جریان I در جهتی است که دیود قادر به عبور آن است .به همین علت اصطلاحاَ گفته می شود دیود در گرایش مستقیم یابایاس مستقیم است . در هر حال اگر توسط پتانسیومتر ولتاژ دو سر دیود را از صفرافزایش دهیم ،مشاهده می شود تا ولتاژ به خصوصی ، جریان قابل ملاحظه ای از دیود عبورنمی کند.به این ولتاژ زانو می گویند ،این ولتاژبرای دیودهای از جنس ژرمانیم 2/0 ولتو برای دیودهای سیلیسیم 7/0 ولت است .تا ولتاژ زانو اگرچه دیود در جهت مستقیم است ،اما هنوز دیود روشن نشده است .از این ولتاژ به بعد ، به طور ناگهان جریان در مدارافزایش یافته و هرچه ...